
Ирина Эланс
КИНЕМАТИКА СЛОЖНОГО ДВИЖЕНИЯ ТОЧКИ. (Решение → 7403)
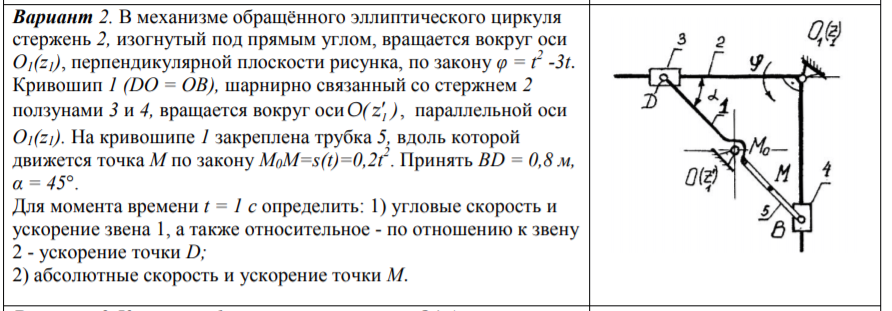
КИНЕМАТИКА СЛОЖНОГО ДВИЖЕНИЯ ТОЧКИ.


- Кинематика сложного движения точки ДЗ 3 принято дьяченко и стихно выполнено без исправлений
- "Кинематика сложного движения точки" - ДЗ третье. Все очень подробно описано. Преподаватель сразу отметил сдачу ДЗ.
- КИНЕМАТИКА СЛОЖНОГО ДВИЖЕНИЯ ТОЧКИДля момента времени t = 1 с выполнить следующее:1. Определить угловые скорость и ускорение звена, несущего на себе точку М, а также относительное ускорение точки D (по отношению к звену 2);2. Найти абсолютные скорость и ускорение точки М.3. Изобразить на рисунках схем механической системы (механизма) все векторы скоростей и ускорений точек М и D. Направление определяемых угловых скоростей и ускорений звеньев указать на схемах круговыми стрелками.
- Кинематика сложного движения точки. Зачтена на макс.балл Вариант 5. Толкатель 1 движется в направляющих N и N1 по закону SA =0,2 3 (3t – t 2 ) и приводит в движение клин 3, на котором в точке D закреплена ось ползуна 4. Ползун 4 скользит по стержню 2 и приводит во вращение вокруг оси O(z1), перпендикулярной плоскости рисунка, стержень 2 и приваренную к нему под прямым углом трубку 5, внутри которой движется точка М по закону MOM = 0,4t – 0,1t 2 . Принять OD = 0,6 м, = 30°, = 60°. Для момента времени t = 1 c определить: 1) угловые скорость и ускорение звена 2, а также относительное - по отношению к звену 2 - ускорение точки D; 2) абсолютные скорость и ускорение точки M.
- кинематика точки и простейшие движения твердого тела
- Кинематика точки и простейшие движения твёрдого тела
- Кинематика точки и простейшие движения твёрдого тела 1) по заданному движению механизма (см.варианты заданий) получить уравнения движения точки M координатныым способом (в декартовой или полярной системе координат, указанной на схеме варианта);2) определить траекторию движения точки M .Для момента времени t =t1 :3) найти скорость v и ускорение a точки M ;4) определить проекции скорости v и ускорения a точки M на оси декартовой системы координат;5) найти касательную aт и нормальную an составляющие ускорения, радиус кривизны ртраектории в данном положении точки M ;6) найти радиальные и трансверсальные составляющие скорости и ускоре-ния точки M. Начало полярной системы координат нужно поместить в началодекартовой, направив полярную ось по осиOx;7) в выбранном масштабе выполнить чертеж с изображением траектории движения точки M. На чертеже указать все составляющие скорости и ускорения точки M в момент времениt = t1 . 1) установить вид движения звеньев механизма.Для момента времени t = t1 ;2) определить угловые скорости и угловые ускорения звеньевмеханизма, совершающих вращательное движение, указав на чертеже круговы-ми стрелками их направления, определить характер движения тел (замедленный или ускоренный);3) определить скорости v и ускорения a тел при поступательномдвижении;4) для точек контакта телAi (i - номер звена) определить скорости, ускорения и изобразить их на схеме механизма в соответствующем масштабе
- Кинематика плоского движения твёрдого тела.
- КИНЕМАТИКА ПЛОСКОГО ДВИЖЕНИЯ ТВЁРДОГО ТЕЛА
- КИНЕМАТИКА ПЛОСКОГО ДВИЖЕНИЯ ТВЁРДОГО ТЕЛАДля момента времени t требуется:1) определить скорости и ускорения точек A, B, C, угловые скорости и ускорения всехзвеньев механизмов; по векторным формулам построить многоугольники скоростейи ускорений точек;2) найти положение мгновенного центра скоростей (МЦС) звеньев механизма имгновенного центра ускорений (МЦУ) звена 2, с их помощью проверитьправильность нахождения скорости и ускорения точки B;3) нанести на рисунок механизма векторы скоростей и ускорений точек A, B, C,обозначить круговыми стрелками направления угловых скоростей и ускоренийзвеньев;4) составить кинематические уравнения для расчета скорости и ускорения точки B,угловых скоростей и ускорений звеньев в зависимости от времени с помощьюЭВМ. Расчеты провести с помощью формул для плоского движениятвердого тела, построить графические зависимости рассчитанных величин отвремени, изобразить несколько положений механизма при движении, сопоставитьрасчеты, выполненные вручную, с расчетами на ЭВМ.
- Кинематика плоского движения точки. Зачтено на максимальный балл. 2022 год.
- Кинематика простейшего движения тела. Тут такая ситуация: тело 1 движется плоско-параллельно, такое движение не относится к простейшему. Эта тема следующего д/з, а здесь просто опечатка (в данном д/з бывает такое в некоторых вариантах), поэтому я пропустил это тело. Стоит уточнить у преподавателя, что делать с этим. Скорее всего он либо поменяет условие, либо разрешит не делать
- Кинематика простейших движений твердого тела. Принял Никандров на макс балл
- Кинематика сложного движения точки