Ирина Эланс
Заказ: 1011988
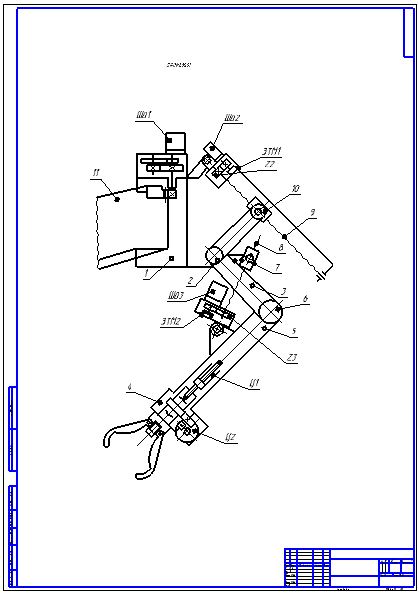
Кинематическая схема манипулятора
Кинематическая схема манипулятора
Описание
Файл в формате CDW


- Кинематическая схема металлообрабатывающего станка
- Кинематическая схема привода с червячной передачей
- Кинематическая схема станка 1286-6
- Кинематическая схема станка 16К20Ф3 (Станок токарный патронно-центровой с ЧПУ )
- Кинематическая схема станка 1К62
- Кинематическая схема станка 3184 (бесцентрово-шлифовальный)
- Кинематическая схема станка 526
- Кинематика - вращательное движение
- «Кинематика и уравновешивание станка-качалки»: – длина (радиус) кривошипа – 1,1 м; – длина шатуна – 2,5 м; – длина переднего плеча балансира – 1,9 м; – длина заднего плеча балансира – 1,6 м; – расстояние по горизонтали между осями опоры балансира и ведомого вала редуктора – 1,9 м; – расстояние по вертикали между осями опоры балансира и ведомого вала редуктора – 2,1 м; – диаметр штанг – 22 мм; – тип насосно-компрессорной трубы – 73×5,5; – диаметр плунжера – 57 мм; – глубина спуска насоса – 1000 м; – погружение насоса под динамический уровень – 300 м; – плотность жидкости – 1000 кг/м³.
- Кинематическая схема T 130
- Кинематическая схема вертикально-сверлильного станка 2Н135Н
- Кинематическая схема вертикально-сверлильного станка 2Р135Ф2
- Кинематическая схема вертикально-фрезерного станка с программным управлением 6Н13Ф3-2
- Кинематическая схема коробки скоростей станка 16К20
Предварительный просмотр