Ирина Эланс
Заказ: 1118202
Курсовая работа по ТММ 1. Структурный кинематический и кинетостатический анализ плоского рычажного механизма2. Расчет маховика3. Синтез зубчатого механизма4. Проектирование кулачкового механизма
Курсовая работа по ТММ 1. Структурный кинематический и кинетостатический анализ плоского рычажного механизма2. Расчет маховика3. Синтез зубчатого механизма4. Проектирование кулачкового механизма
Описание
Техническое задание
Исходные данные
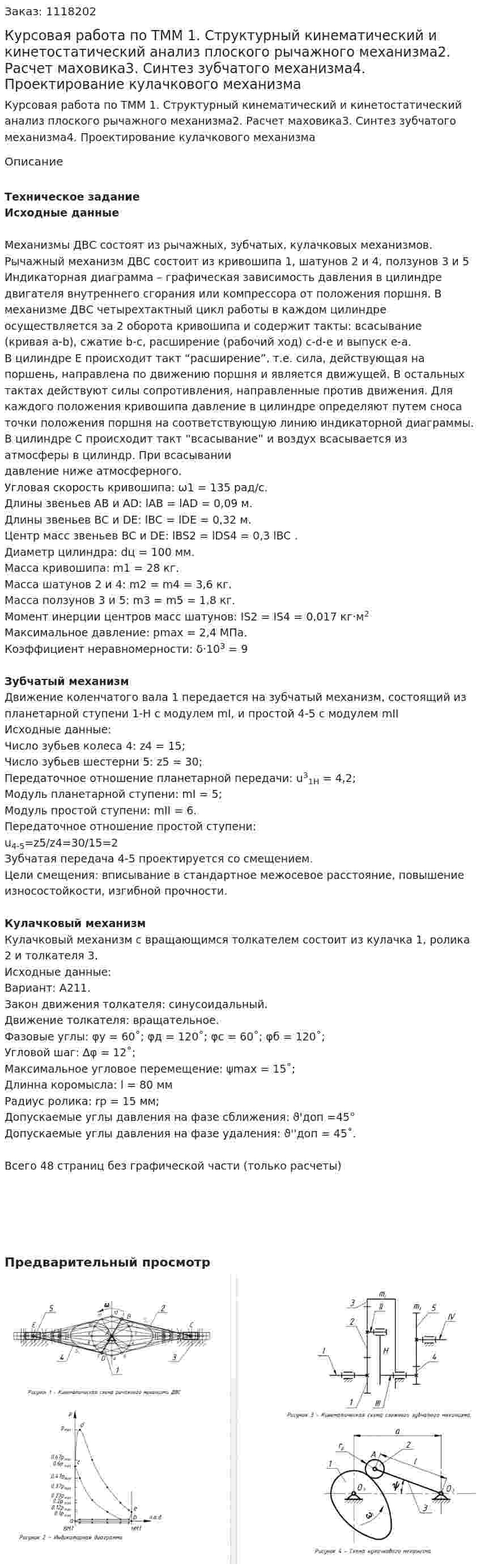
Механизмы ДВС состоят из рычажных, зубчатых, кулачковых механизмов.
Рычажный механизм ДВС состоит из кривошипа 1, шатунов 2 и 4, ползунов 3 и 5
Индикаторная диаграмма – графическая зависимость давления в цилиндре
двигателя внутреннего сгорания или компрессора от положения поршня. В
механизме ДВС четырехтактный цикл работы в каждом цилиндре
осуществляется за 2 оборота кривошипа и содержит такты: всасывание
(кривая a-b), сжатие b-c, расширение (рабочий ход) c-d-e и выпуск e-a.
В цилиндре Е происходит такт “расширение”, т.е. сила, действующая на
поршень, направлена по движению поршня и является движущей. В остальных
тактах действуют силы сопротивления, направленные против движения. Для
каждого положения кривошипа давление в цилиндре определяют путем сноса
точки положения поршня на соответствующую линию индикаторной диаграммы.
В цилиндре С происходит такт “всасывание” и воздух всасывается из
атмосферы в цилиндр. При всасывании давление ниже атмосферного.
Угловая скорость кривошипа: ω1 = 135 рад/с.
Длины звеньев АВ и АD: lAB = lAD = 0,09 м.
Длины звеньев BC и DE: lBC = lDE = 0,32 м.
Центр масс звеньев BC и DE: lBS2 = lDS4 = 0,3 lBC .
Диаметр цилиндра: dц = 100 мм.
Масса кривошипа: m1 = 28 кг.
Масса шатунов 2 и 4: m2 = m4 = 3,6 кг.
Масса ползунов 3 и 5: m3 = m5 = 1,8 кг.
Момент инерции центров масс шатунов: IS2 = IS4 = 0,017 кг·м2
Максимальное давление: pmax = 2,4 МПа.
Коэффициент неравномерности: δ·103 = 9
Зубчатый механизм
Движение коленчатого вала 1 передается на зубчатый механизм, состоящий из планетарной ступени 1-Н с модулем mI, и простой 4-5 с модулем mII
Исходные данные:
Число зубьев колеса 4: z4 = 15;
Число зубьев шестерни 5: z5 = 30;
Передаточное отношение планетарной передачи: u31H = 4,2;
Модуль планетарной ступени: mI = 5;
Модуль простой ступени: mII = 6.
Передаточное отношение простой ступени:
u4-5=z5/z4=30/15=2
Зубчатая передача 4-5 проектируется со смещением.
Цели смещения: вписывание в стандартное межосевое расстояние, повышение
износостойкости, изгибной прочности.
Кулачковый механизм
Кулачковый механизм с вращающимся толкателем состоит из кулачка 1, ролика 2 и толкателя 3.
Исходные данные:
Вариант: А211.
Закон движения толкателя: синусоидальный.
Движение толкателя: вращательное.
Фазовые углы: φу = 60˚; φд = 120˚; φс = 60˚; φб = 120˚;
Угловой шаг: ∆φ = 12˚;
Максимальное угловое перемещение: ψmax = 15˚;
Длинна коромысла: l = 80 мм
Радиус ролика: rр = 15 мм;
Допускаемые углы давления на фазе сближения: ϑ'доп =45°
Допускаемые углы давления на фазе удаления: ϑ''доп = 45˚.
Всего 48 страниц без графической части (только расчеты)


- КУРСОВАЯ РАБОТА по учебному курсу «Теория механизмов и машин» Вариант 16Для рычажного механизма Для схемы известны параметры: Частота вращения ведущего звена - nAB = 650 об/мин Длины звеньев rAB = 140 мм, lBC = 560 мм, lBD = 560 мм. Расчет производится для угла поворота кривошипа f1 = 240°. Для кулачкового механизма имеем начальные значения Угол удаления φу = 96º, Угол дальнего стояния φд = 0,0º Угол возврата φв = 96º Минимальный угол передачи движения γmin=60º Подъем толкателя h=60 мм=0,060 м. Направление вращения кулачка против часовой стрелки.
- Курсовая работа по численным методамПолучить таблицу значений функции f(y) для ряда равноотстоящих (с шагом h) значений y є [c, d].Численный метод интегрирования должен обеспечивать точность ε.Значение параметра k – абсцисса точки минимума функции P(x)=2x2-ex на отрезке [m; n]. Провести интерполяцию полученных значений функции f(y), обеспечив погрешность интерполяции 10-2
- Курсовая работа по экономике на тему - Инвестиционные Операции на Международных Финансовых Рынках (курсовая работа)
- Курсовая работа по электронике Вариант 4Дано Модель транзистора: ГТ310А Eп = 8 В Rн = 1 кОм
- Курсовая работа по электроснабжению1. Построить графики активной, реактивной и полной мощностей, передаваемых в электрическую систему. 2. Выбрать число и мощность повышающих трансформаторов. 3. Выбрать количество и мощность трансформаторов (или реакторов) для питания собственных нужд. 4. Составить главную схему электрических соединений станции. 5. Составить схему собственных нужд станций на высшем напряжении собственных нужд. Вариант 25
- Курсовая работа: Привод ленточного конвеера Исходные данные: 1. Частота вращения приводного вала транспортера - n =90 об/мин. 2. Мощность на приводном валу транспортера - P =2,8 кВт. 3. Срок службы транспортера - L=5 лет. 4. Коэффициент суточной загрузки - Ксут=0,29. 5. Коэффициент годовой загрузки Кгод=0,8.
- Курсовая работа. Привод цепной передачиСпроектировать привод. В состав привода входят следующие передачи: 1 - червячная передача; 2 - открытая цепная передача. Сила на выходном элементе привода F = 5 кН. Скорость на ленте (цепи) привода V = 0,2 м/с. Шаг тяговой звёздочки t = 65 мм. Количество зубьев тяговой звёздочки Z = 14. Коэффициент перегрузки Кп = 1,5. Коэффициент годового использования Кг = 0,3. Коэффициент использования в течении смены Кс = 0,29. Срок службы L = 5 лет. Число смен S = 1. Продолжительность смены T = 8 ч. Тип нагрузки - переменный.
- Курсовая работа по теории цепей Вариант 1Дано: Схема 3. Выход U6 ω0=2,6•106 с-1 Z1 = 0.5 кОм Z2=Z6=5-j1000 Ом Z3=Z5 = 4+j1000 Ом Z4 = j11 Ом Z7 = 0.004 МОм
- Курсовая работа по теории цепейВариант 1 (Схема 1, выход U3)ω0=2.1•106 с-1 Z1 = 700 кОм Z2=Z6=3+j600 Ом Z3=Z5 = 2-j600 Ом Z4 = -j5 Ом Z7 = -j0.6 МОм
- Курсовая работа по теории цепейВариант 1 (Схема 1, выход U3)ω0=2.1•106 с-1 Z1 = 700 кОм Z2=Z6=3+j600 Ом Z3=Z5 = 2-j600 Ом Z4 = -j5 Ом Z7 = -j0.6 МОм
- Курсовая работа по теории цепейВариант 21 (Схема 1, выход U3)ω0=2.2•106 с-1 Z1 = 700 кОм Z2=Z6=2+j600 Ом Z3=Z5 = 3-j600 Ом Z4 = -j6 Ом Z7 = -j0.5 МОм
- Курсовая работа по теории цепейВариант 21 (Схема 1, выход U3)ω0=2.2•106 с-1 Z1 = 700 кОм Z2=Z6=2+j600 Ом Z3=Z5 = 3-j600 Ом Z4 = -j6 Ом Z7 = -j0.5 МОм
- Курсовая работа по теории цепей Вариант 9Дано: Схема 4. Выход I3 ω0=5,5•106 с-1 Z1 = 0.003 кОм Z2=Z6=7-j1900 Ом Z3=Z5 = 6+j1900 Ом Z4 = j12 Ом Z7 = -j0.8 Мом
- Курсовая работа по теории цепей Вариант 9Дано: Схема 4. Выход I3 ω0=5,5•106 с-1 Z1 = 0.003 кОм Z2=Z6=7-j1900 Ом Z3=Z5 = 6+j1900 Ом Z4 = j12 Ом Z7 = -j0.8 Мом
Предварительный просмотр