Ирина Эланс
Заказ: 1047703
Линейные автоматические системы регулирования (курсовая работа)
Линейные автоматические системы регулирования (курсовая работа)
Описание
СОДЕРЖАНИЕ 2
Введение 5
1 Построение статической характеристики объекта 8
1.1 Ручной расчет коэффициентов для полинома первого порядкa…………………………….9
1.2 Ручной расчет коэффициентов для полинома второго порядка……………………….12
1.3 Построение статической модели обьекта с помощью ЭВМ 15
1.3.1 Решение СЛАУ методом регрессионного анализа……………………………………..15
1.3.2 Решение СЛАУ методом Гаусса…………………………………………………….......18
1.4 Расчет коэффициентов передачи 20
2 Построение динамической модели объекта 23
2.1 Ручной расчет коэффициентов для полинома первого порядка без запаздывания……24
2.2 Ручной расчет коэффициентов для полинома первого порядка с запаздывание …….28
2.3 Построение динамической модели объекта с помощью ЭВМ 32
2.3.1 Модель объекта первого порядка без запаздывания …………………………………..32
2.3.2 Модель объекта первого порядка c запаздыванием 34
2.3.3 Модель объекта второго порядка без запаздывания 36
2.3.4 Модель объекта второго порядка с запаздыванием 38
3 Построение математической модели объекта 41
3.1 Ручной расчет математической модели 42
3.2 Построения математической модели объекта с использованием ЭВМ. 45
4 Расчет частотных характеристик объекта 46
4.1 Постановка задачи…………………………………………………………………………46
4.2 Ручной расчет частотных характеристик 47
4.3 Расчет частотных характеристик объекта в системе MathCAD 48
4.4 Ручной расчет расширенных частотных характеристик 51
4.5 Расчёт расширенных частотных характеристик объекта в системе Mathcad 53
5 Выбор и расчет параметров настройки регуляторов 56
5.1 Расчет регуляторов………………………………………………………………………..57
5.1.1 Ручной расчет П – регулятора 57
5.1.1.1 Машинный расчёт П - регулятора 59
5.1.2 Ручной расчет И – регулятора 61
5.1.2.2 Машинный расчёт И – регулятора 62
5.1.3 Ручной расчет ПИ – регулятора 64
5.1.3.3 Машинный расчёт ПИ – регулятора 65
6 Передаточные функции САУ 68
6.1 Разомкнутые системы…………………………………………………………………….68
6.2 Замкнутые системы……………………………………………………………………….69
7 Исследование на устойчивость систем автоматического управления…………………..70
7.1 Постановка задачи…………………………………………………………………………70
7.2 Методы исследования САУ на устойчивость……………………………………………71
7.2.1 Исследование на устойчивость САУ по корням характеристического уравнения 73
7.2.2 Исследование на устойчивость САУ по частотному критерию Найквиста 75
7.2.3 Исследование на устойчивость САУ по критерию Гурвица 78
7.2.4 Исследование на устойчивость САУ по частотному критерию Михайлова 82
8 Построение переходных процессов 87
8.1 Постановка задачи. Обзор методов решения 87
8.2 Приведение к системе дифференциальных уравнений (ручной расчёт)………………..90
8.2.1 Замкнутая система с П – регулятором по возмущению 91
8.2.2 Замкнутая система с П – регулятором по управлению 92
8.2.3 Замкнутая система с И – регулятором по возмущению 93
8.2.4 Замкнутая система с И – регулятором по управлению 94
8.2.5 Замкнутая система с ПИ – регулятором по возмущению 96
8.2.4 Замкнутая система с ПИ – регулятором по управлению 97
8.3 Построение переходных процессов на ЭВМ в замкнутых системах по возмущению…98
8.3.1 Система с П – регулятором в системе Mathcad 98
8.3.2 Система с П – регулятором в системе Matlab 99
8.3.3 Система с И – регулятором в системе Mathcad 100
8.3.4 Система с И – регулятором в системе Matlab 101
8.3.5 Система с ПИ – регулятором в системе Mathcad 102
8.3.6 Система с ПИ – регулятором в системе Matlab 103
8.4 Построение переходных процессов на ЭВМ в замкнутых системах по управлению...104
8.4.1 Система с П – регулятором в системе Mathcad 104
8.4.2 Система с П – регулятором в системе Matlab 105
8.4.3 Система с И – регулятором в системе Mathcad 105
8.4.4 Система с И – регулятором в системе Matlab 106
8.4.5 Система с ПИ – регулятором в системе Mathcad 107
8.4.6 Система с ПИ – регулятором в системе Matlab 108
9 Оценка качества работы САУ 109
9.1 Постановка задачи. Критерии качества переходных процессов……………………...109
9.2 Оценка качества замкнутых САУ по возмущению……………………………………..112
9.2.1 Система с П - регулятором 112
9.2.2 Система с И - регулятором 113
9.2.3 Система с ПИ - регулятором 113
9.3 Оценка качества замкнутых САУ по управлению……………………………………...113
9.3.1 Система с П – регулятором 113
9.3.2 Система с И - регулятором. 114
9.3.3 Система с ПИ - регулятором. 115
Выводы 117
Литература 118
Всего 121 страница


- Линейные данные: а=6 м в=3 м с=5 м д=4 м h=8 м l=10 м P=60 кН q=6 кН/м Ma (момент) = 90 кН м Определить: 1. Степень статической неопределимости 2. Выполнить анализ геометрической структуры сооружения 3.Определить реакции опор 4. Построить эпюру М
- Линейные данные: а=6 м в=3 м с=5 м д=4 м h=8 м l=10 м P=60 кН q=6 кН/м Ma (момент) = 90 кН м Определить: 1. Степень статической неопределимости 2. Выполнить анализ геометрической структуры сооружения 3.Определить реакции опор 4. Построить эпюру М 5. Построить эпюры Q,N
- Линейные данные: а=6 м в=3 м с=5 м д=4 м h=8 м l=10 м P=60 кН q=6 кН/м Ma (момент) = 90 кН м Определить: 1. Степень статической неопределимости 2. Выполнить анализ геометрической структуры сооружения 3.Определить реакции опор 4. Построить эпюру М 5. Построить эпюры Q,N
- Линейные данные: а=6 м в=3 м с=5 м д=4 м h=8 м l=10 м P=60 кН q=6 кН/м Ma (момент) = 90 кН м Определить: 1. Степень статической неопределимости 2. Выполнить анализ геометрической структуры сооружения 3.Определить реакции опор 4. Построить эпюру М 5. Построить эпюры Q,N
- Линейные данные: а=6 м в=3 м с=5 м д=4 м h=8 м l=10 м P=60 кН q=6 кН/м Ma (момент) = 90 кН м Определить: 1. Степень статической неопределимости 2. Выполнить анализ геометрической структуры сооружения 3.Определить реакции опор 4. Построить эпюру М 5. Построить эпюры QN
- Линейные данные: а=6 м в=3 м с=5 м д=4 м h=8 м l=10 м P=60 кН q=6 кН/м Ma (момент) = 90 кН м Определить: 1. Степень статической неопределимости 2. Выполнить анализ геометрической структуры сооружения 3.Определить реакции опор 4. Построить эпюру М 5. Построить эпюры QN 6.Проверить равновесие узлов.
- Линейные данные: а=6 м в=3 м с=5 м д=4 м h=8 м l=10 м P=60 кН q=6 кН/м Ma (момент) = 90 кН м Определить: 1. Степень статической неопределимости 2. Выполнить анализ геометрической структуры сооружения 3.Определить реакции опор 4. Построить эпюру М 5. Построить эпюры QN 6.Проверить равновесие узлов.
- Линейное напряжение трехфазной осветительной установки равно 220 вольт линейный ток 9 ампер сколько ламп включено в каждую фазу нагрузки при соединении этих фаз треугольником. Какова мощность всей установки если каждая лампа потребляет 0,52 ампера
- Линейное напряжение трехфазной осветительной установки равно 220 вольт линейный ток 9 ампер сколько ламп включено в каждую фазу нагрузки при соединении этих фаз треугольником. Какова мощность всей установки если каждая лампа потребляет 0,52 ампера
- Линейное напряжение трехфазной сети Uл = 220 В. Сопротивление лампочки r = 10 Ом. Определить активную мощность P
- Линейное напряжение трехфазной сети Uл = 220 В. Сопротивление лампочки r = 10 Ом. Определить активную мощность P
- Линейное программирование и его применение в экономике и управлении (курсовая работа)
- Линейное сопротивление 250 Ом и два нелинейных сопротивления, вольтамперные характеристики которых изображены на графике, соединены параллельно. Ток в линейном сопротивлении равен 0.6 А. Найти ток в неразветвленной части цепи.
- Линейное сопротивление 250 Ом и два нелинейных сопротивления, вольтамперные характеристики которых изображены на графике, соединены параллельно. Ток в линейном сопротивлении равен 0.6 А. Найти ток в неразветвленной части цепи.
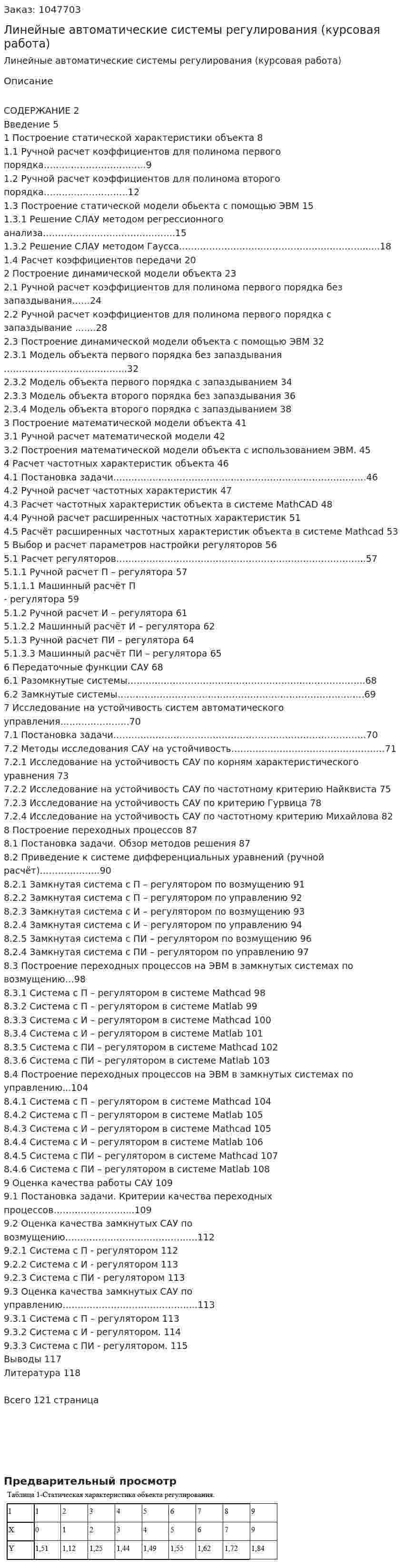
Предварительный просмотр