Ирина Эланс
Заказ: 1024157
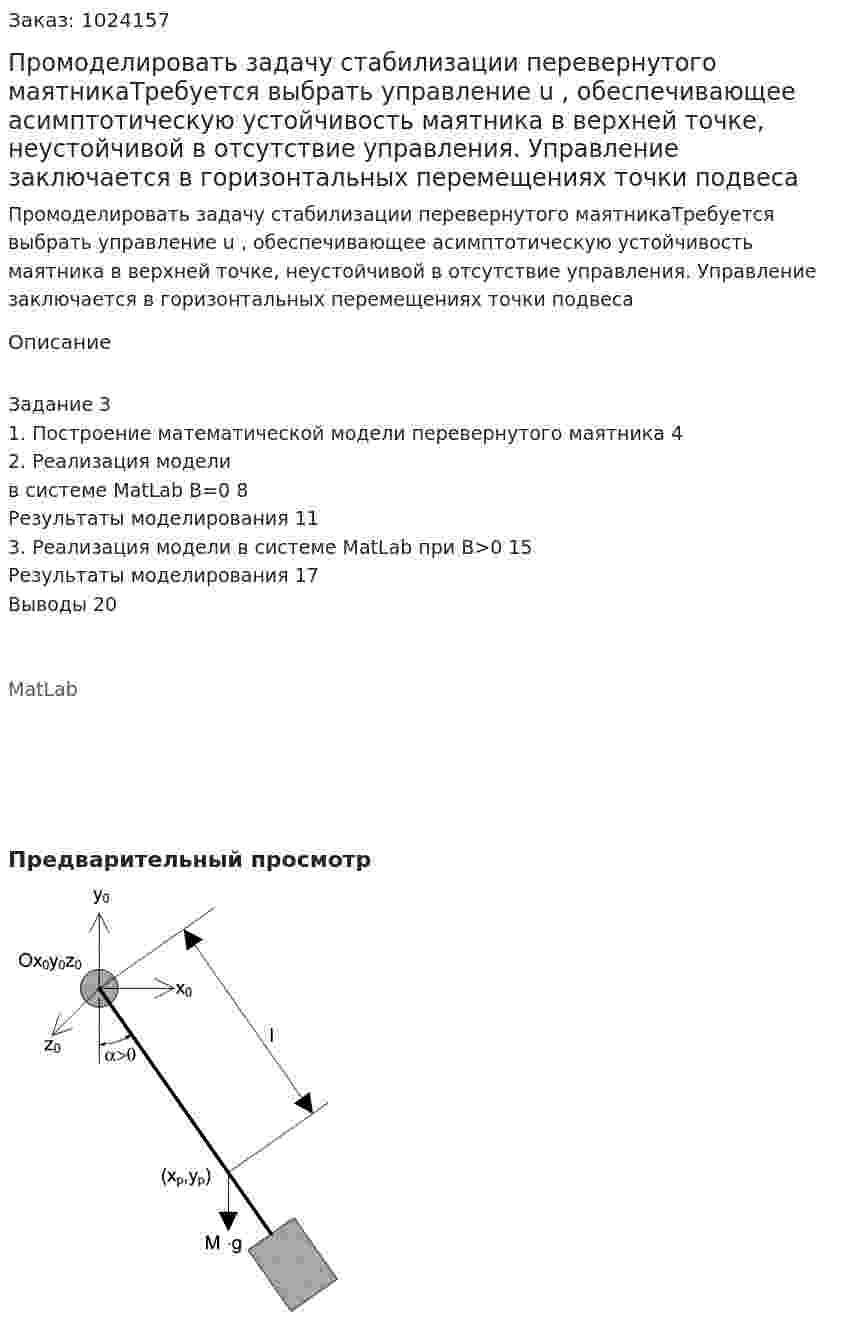
Промоделировать задачу стабилизации перевернутого маятникаТребуется выбрать управление u , обеспечивающее асимптотическую устойчивость маятника в верхней точке, неустойчивой в отсутствие управления. Управление заключается в горизонтальных перемещениях точки подвеса
Промоделировать задачу стабилизации перевернутого маятникаТребуется выбрать управление u , обеспечивающее асимптотическую устойчивость маятника в верхней точке, неустойчивой в отсутствие управления. Управление заключается в горизонтальных перемещениях точки подвеса
Описание
Задание 3
1. Построение математической модели перевернутого маятника 4
2. Реализация модели в системе MatLab В=0 8
Результаты моделирования 11
3. Реализация модели в системе MatLab при В>0 15
Результаты моделирования 17
Выводы 20
MatLab


- Промышленная собственность. (реферат)
- Промышленное предприятие «Белвар» в 2004 г. определило главной целью максимизировать прибыль. По предварительным исследованиям для достижения этой цели можно использовать два подхода: увеличение объемов производства, снижение себестоимости продукции. Отделу маркетинга необходимо провести анализ по группе товаров (миксеры) и сделать вывод о более рациональном подходе. Оптовая цена миксера – 30 000 рублей.Определить удельный вес прироста прибыли в 2004 г. за счет снижения себестоимости и увеличения объемов производства
- Промышленное предприятие в течении года потребляет Wr = 500 млн. кВт-час электроэнергии. Средний коэффициент заполнения годового графика электрической нагрузки по предприятию составляет γ = 0,56 %. В результате установки синхронного компенсатора, капитальные затраты по которому с монтажом составили К = 3,5 млн. грн., потери электроэнергии в сетях снизились на W = 3%. В задаче необходимо определить: 1) годовую плату за потребленную электроэнергию при среднем коэффициенте заполнения годового графика, а также при его повышении на 10 % и снижении на 15 %; 2) полученную экономию и перерасход в оплате за потребленную электроэнергию по сравнению с оплатой при среднем коэффициенте заполнения; 3) ответить на вопрос, почему энергосистемы экономически заинтересованы в лучшем заполнении графиков электропотребления промышленными предприятиями и как это практически достигается; 4) построить кривую зависимости среднего тарифа на электроэнергию промышленного предприятия от величины коэффициента заполнения среднегодового графика нагрузки; 5) экономию от снижения потерь электроэнергии; 6) годовой экономический эффект от установки синхронного компенсатора; 7) срок окупаемости синхронного компенсатора.
- Промышленное предприятие застраховало свое оборудование на условиях совместного страхования. Ответственность по данному риску разделили между собой три страховые компании. Договором предусмотрено, что ответственность первого страховщика составляет 30%, второго и третьего соответственно 1:1. страхователь обязан уплатить страховую премию каждому страховщику в соответствии с его долей участия в данном страховом риске. В результате аварии объекту страхования причинен ущерб. Определить: 1) размер страховой премии, уплаченной каждому страховщику; 2) величину страхового возмещения, полученную страхователем от каждого страховщика. страховой возмещение убыток премия
- Промышленность России и развитие целлюлозно-бумажной промышленности. (курсовая работа)
- Промышленные комплексы. Прогнозирование объема промышленного производства и его структуры. (реферат)
- Пропеллер самолета, делающий 1200 об/мин, после выключения двигателя останавливается через 8 с. Сколько оборотов сделал пропеллер за это время, если считать его вращение равнозамедленным?
- Прокладка
- Прокладка
- Прокладка
- Прологарифмировать по основанию 10 выражение
- Промежуточный вал-шестерня. Сталь 40ХН ГОСТ 4543-71
- Промежуточный корпус
- Промежуточный тип рыночной структуры. (курсовая работа)
Предварительный просмотр