Ирина Эланс
Заказ: 1002722
Разработать систему автоматического управления и регулирования, построенную по замкнутому принципу, для заданного объекта управления. Система предназначена для стабилизации во времени рабочих параметров объекта управления с выполнением требований по устойчивости, быстродействию и точности.
Разработать систему автоматического управления и регулирования, построенную по замкнутому принципу, для заданного объекта управления. Система предназначена для стабилизации во времени рабочих параметров объекта управления с выполнением требований по устойчивости, быстродействию и точности.
Описание
Задание на курсовую работу.
Разработать систему автоматического управления и регулирования, построенную по замкнутому принципу, для заданного объекта управления. Система предназначена для стабилизации во времени рабочих параметров объекта управления с выполнением требований по устойчивости, быстродействию и точности.
Произвести анализ процессов объекта и систем во временной и частотных областях, выбрать оптимальные параметры регулятора, определить устойчивость и оценки качества для выбранного регулятора.
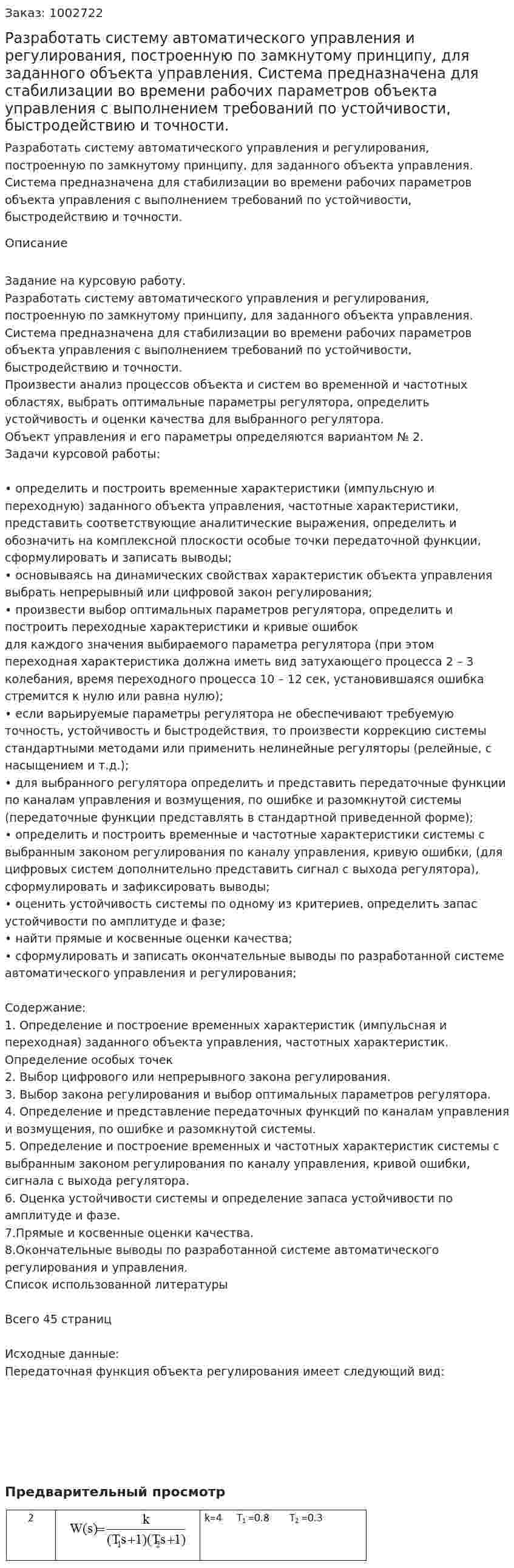
Объект управления и его параметры определяются вариантом № 2.
Задачи курсовой работы:
• определить и построить временные характеристики (импульсную и переходную) заданного объекта управления, частотные характеристики, представить соответствующие аналитические выражения, определить и обозначить на комплексной плоскости особые точки передаточной функции, сформулировать и записать выводы;
• основываясь на динамических свойствах характеристик объекта управления выбрать непрерывный или цифровой закон регулирования;
• произвести выбор оптимальных параметров регулятора, определить и построить переходные характеристики и кривые ошибок для каждого значения выбираемого параметра регулятора (при этом переходная характеристика должна иметь вид затухающего процесса 2 – 3 колебания, время переходного процесса 10 – 12 сек, установившаяся ошибка стремится к нулю или равна нулю);
• если варьируемые параметры регулятора не обеспечивают требуемую точность, устойчивость и быстродействия, то произвести коррекцию системы стандартными методами или применить нелинейные регуляторы (релейные, с насыщением и т.д.);
• для выбранного регулятора определить и представить передаточные функции по каналам управления и возмущения, по ошибке и разомкнутой системы (передаточные функции представлять в стандартной приведенной форме);
• определить и построить временные и частотные характеристики системы с выбранным законом регулирования по каналу управления, кривую ошибки, (для цифровых систем дополнительно представить сигнал с выхода регулятора), сформулировать и зафиксировать выводы;
• оценить устойчивость системы по одному из критериев, определить запас устойчивости по амплитуде и фазе;
• найти прямые и косвенные оценки качества;
• сформулировать и записать окончательные выводы по разработанной системе автоматического управления и регулирования;
Содержание:
1. Определение и построение временных характеристик (импульсная и переходная) заданного объекта управления, частотных характеристик. Определение особых точек
2. Выбор цифрового или непрерывного закона регулирования.
3. Выбор закона регулирования и выбор оптимальных параметров регулятора.
4. Определение и представление передаточных функций по каналам управления и возмущения, по ошибке и разомкнутой системы.
5. Определение и построение временных и частотных характеристик системы с выбранным законом регулирования по каналу управления, кривой ошибки, сигнала с выхода регулятора.
6. Оценка устойчивости системы и определение запаса устойчивости по амплитуде и фазе.
7.Прямые и косвенные оценки качества.
8.Окончательные выводы по разработанной системе автоматического регулирования и управления.
Список использованной литературы
Всего 45 страниц
Исходные данные:
Передаточная функция объекта регулирования имеет следующий вид:


- Разработать систему управления цифровым осциллографом
- Разработать структурную схему нескорректированной системы и определить передаточные функции ее звеньев. 2. Определить показатели качества исходной системы, в том числе, оценить точность, запасы устойчивости и быстродействие. 3. Выполнить синтез внутренних контуров САУ методом последовательной коррекции с подчиненным регулированием координат. 4. Выполнить синтез основного контура регулирования с использованием логарифмических частотных характеристик. 5. Разработать схемы корректирующих устройств (регуляторов) всех контуров САУ в виде активных и пассивных фильтров. 6. Оценить показатели качества скорректированной системы. 7. Разработать функциональную схему скорректированной системы Вариант 4
- Разработать схему дешифратора по таблице истинности и нарисовать синхронные диаграммы работы
- Разработать схему дешифратора по таблице истинности и нарисовать синхронные диаграммы работы Вариант 10
- Разработать схему дешифратора по таблице истинности и нарисовать синхронные диаграммы работы Вариант 11
- Разработать схему дешифратора по таблице истинности и нарисовать синхронные диаграммы работы Вариант 12
- Разработать схему и программу на языке Турбо-Паскаль (с пояснениями). Вычислить сумму конечного ряда: S=3x+6x2+9x3+…+30x10
- Разработать конструкцию станка для обработки концов и концевых соединений труб резанием, на базе станка отечественного производства «СТАРТ 450 Ф» (Дипломный проект)
- Разработать МП оконечное устройство индикации цифрового частотомера
- Разработать обучающую программу по Функциям в среде Turbo Pascal 7.0.
- Разработать последовательную структуру данных для представления простейшей базы данных на файлах в СП Си. Составить программу генерации внешнего нетекстового файла заданной структуры, содержащего набор записей. Распечатать содержимое сгенерированного файла в виде таблицы и выполнить над ним заданное действие для 2-3 значений параметров запроса p. Распечатать результат. Вариант 17: Информация об успеваемости студентов данной группы по всем предметам: фамилия, инициалы, пол, номер группы, отметки по экзаменам и зачетам. Действие: Выяснить, в какой группе студентки имею максимальный средний балл.
- Разработать преобразователь кода для преобразования входной функции в соответствующую ей выходную функцию(Расчетная работа по дисциплине «Схемотехника» Вариант 10)
- Разработать преобразователь прямого хода в обратный используя КР1533ИП3
- Разработать сетевой график на проведение одного из комплексов работ в автосервисе - по проверке и регулировке зазора между коромыслом и стержнем клапана автомобиля ГАЗ-53А.
Предварительный просмотр