Ирина Эланс
Заказ: 1085860
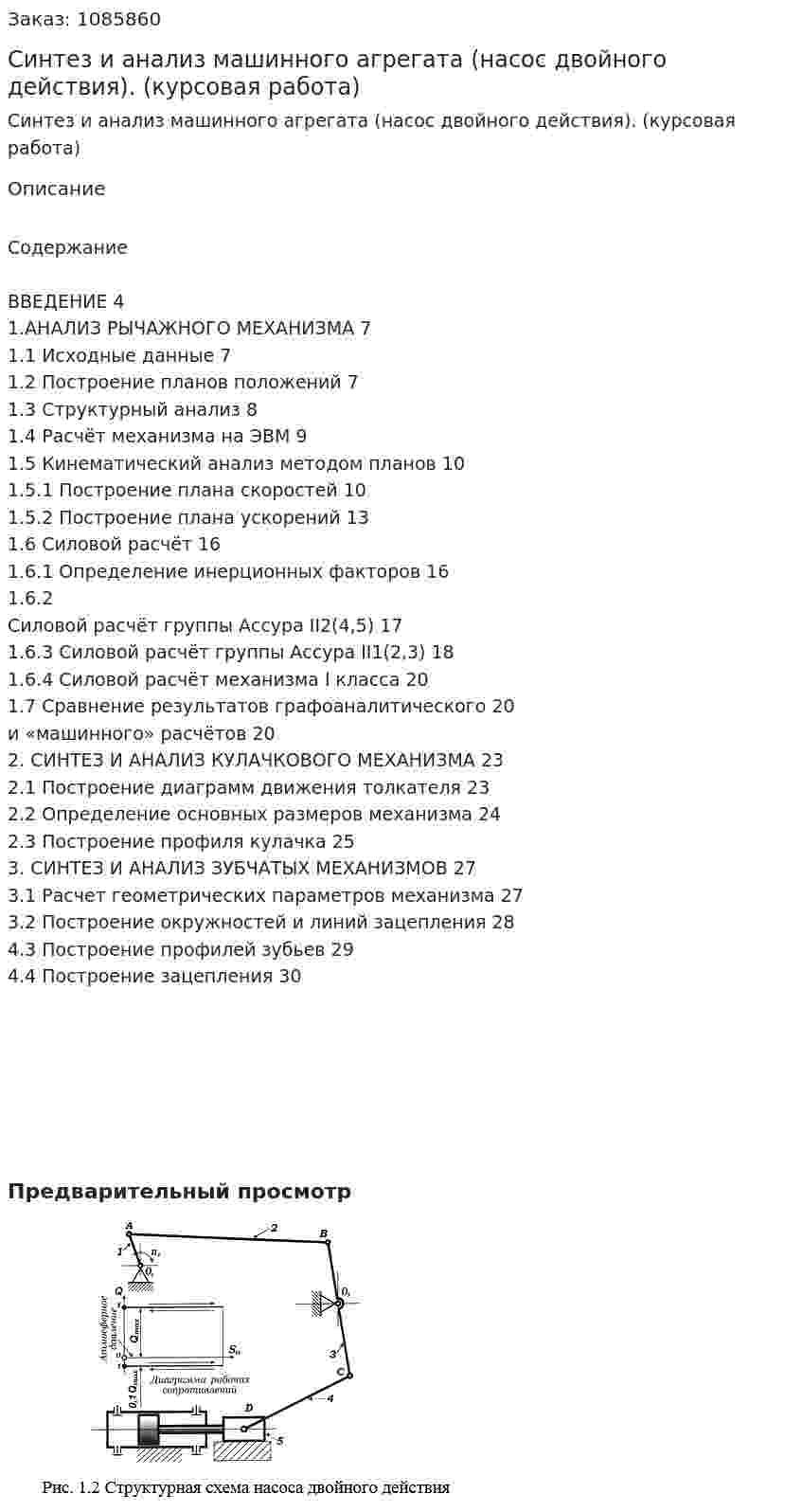
Синтез и анализ машинного агрегата (насос двойного действия). (курсовая работа)
Синтез и анализ машинного агрегата (насос двойного действия). (курсовая работа)
Описание
Содержание
ВВЕДЕНИЕ 4
1.АНАЛИЗ РЫЧАЖНОГО МЕХАНИЗМА 7
1.1 Исходные данные 7
1.2 Построение планов положений 7
1.3 Структурный анализ 8
1.4 Расчёт механизма на ЭВМ 9
1.5 Кинематический анализ методом планов 10
1.5.1 Построение плана скоростей 10
1.5.2 Построение плана ускорений 13
1.6 Силовой расчёт 16
1.6.1 Определение инерционных факторов 16
1.6.2 Силовой расчёт группы Ассура II2(4,5) 17
1.6.3 Силовой расчёт группы Ассура II1(2,3) 18
1.6.4 Силовой расчёт механизма I класса 20
1.7 Сравнение результатов графоаналитического 20
и «машинного» расчётов 20
2. СИНТЕЗ И АНАЛИЗ КУЛАЧКОВОГО МЕХАНИЗМА 23
2.1 Построение диаграмм движения толкателя 23
2.2 Определение основных размеров механизма 24
2.3 Построение профиля кулачка 25
3. СИНТЕЗ И АНАЛИЗ ЗУБЧАТЫХ МЕХАНИЗМОВ 27
3.1 Расчет геометрических параметров механизма 27
3.2 Построение окружностей и линий зацепления 28
4.3 Построение профилей зубьев 29
4.4 Построение зацепления 30


- Синтез и исследование комбинированных систем регулирования (лабораторная работа)
- Синтез и исследование одноконтурных систем регулирования (лабораторная работа)
- Синтез интерферона у человека определяется сочетанием 2 доминантных генов, один из которых находится во 2 хромосоме, а другой – в 5 хромосоме. Присутствие в генотипе одной доминантной аллели или же отсутствие доминантных аллелей определяет неспособность синтезировать интерферон. Определить вероятность рождения ребенка, не способного синтезировать интерферон в семье, где оба родителя гетерозиготны по данным генам. А – ген синтеза интерферона а – ген отсутствия интереферона В – ген синтеза интерферона в – ген отсутствия интереферона
- Синтезировать замкнутую систему с линейной статической обратной связью, обеспечивающей заданный спектр матрицы замкнутой системы на основе преобразования ММ ОУ в управляемую форму Луенбергерав предположении, что все переменные вектора состояния доступны для измерений, выполнить следующие расчеты: 1) проверить критерий управляемости; 2) составить характеристический полином матрицы и получить представление исходной системы в управляемой форме Луенбергера; 3) для заданного спектра (см. табл. ДЗ1) составить эталонный характеристический полином; сформировать обратную связь в терминах канонической системы; 4) найти матрицу перехода к управляемой форме Луенбергера; 5) формализовать закон управления в терминах исходной системы; сделать проверку. Провести моделирование в среде MATLAB–SIMULINK. Представить: 6) структурную схему замкнутой системы в терминах MATLAB–SIMULINK; 7) графики xi(t), i=1.3, u(t) для расчетного случая. Вариант 4
- Синтезировать принципиальную схему для реализации логической функции (рис.) на микросхемах К155ЛА3. 2. Определить количество корпусов микросхем К155ЛА3, которое необходимо для реализации схемы.
- Синтезируйте динамический синхронный RS-триггер управляемый положительным перепадом на основе динамического синхронного T-триггера, управляемого отрицательным перепадом. Определите параметры быстродействия синтезированного триггера.
- Синтезируйте синхронный суммирующий счетчик с Kсч=10 на основе синхронных RS-триггеров с динамическим управлением по положительному перепаду. Постройте временные диаграммы и определите параметры быстродействия.
- Синезеленые водоросли – продуценты токсических веществ. (реферат)
- Синтаксический анализ контекстно-свободных грамматик (Отчет по лабораторной работе № 2 по дисциплине «Теория языков программирования и методы трансляции» Вариант 1)
- Синтез абстрактного автомата
- Синтез, анализ зубчато механизма и профилирование зацепления (задание №17)1. Произвести разбивку передаточного отношения сложного зубчатого механизма по ступеням и подобрать числа зубьев зубчатых колес, Размеры механизма должны быть минимальными 2. Определить основные геометрические параметры всех зубчатых колёс механизма 3. Определить числа оборотов всех звеньев механизма 4. Провести полный геометрический расчёт одного и того же эвольвентного зацепления зубчатых колёс, нарезанных со смещением режущего инструмента (А) и без (Б – нулевые колёса). Результаты расчёта геометрических параметров зубчатых колёс свести в таблицу 5. определить КПД всего механизма (КПД, одной пары зубчатых колёс принять 0,99)
- Синтез броматов редкоземельных элементов. (курсовая работа)
- Синтез дискретного устройства управления объектами электроснабжения системы обеспечения движения поездов (курсовая работа)
- Синтез зубчатого зацепленияДанные для расчета: Z1 = 17, аw = 120, m = 6 мм.
Предварительный просмотр