
Механическая система состоит из грузов 1 и 2, ступенчатого шкива 3 с радиусами ступеней 𝑅3 = 0,3 м, 𝑟3 = 0,1 м и радиусом инерции относительно оси вращения 𝜌3 =0,2 м, блока 4 радиуса 𝑅4 = 0, 2 м и катка (или подвижного блока) 5; тело 5 считать сплошным однородным цилиндром, а массу блока 4 – равномерно распределенной по ободу. Коэффициент трения груза о плоскость 𝑓 = 0,1. Тела системы соединены друг с другом нитями, перекинутыми через блоки и намотанными на шкив 3 (или на шкив и каток); участки нитей параллельны соответствующим плоскостям. (Решение → 12497)
Заказ №39131
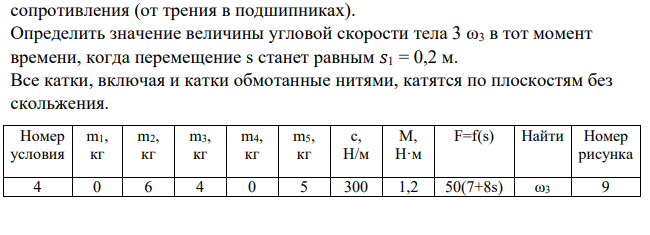
Механическая система состоит из грузов 1 и 2, ступенчатого шкива 3 с радиусами ступеней 𝑅3 = 0,3 м, 𝑟3 = 0,1 м и радиусом инерции относительно оси вращения 𝜌3 =0,2 м, блока 4 радиуса 𝑅4 = 0, 2 м и катка (или подвижного блока) 5; тело 5 считать сплошным однородным цилиндром, а массу блока 4 – равномерно распределенной по ободу. Коэффициент трения груза о плоскость 𝑓 = 0,1. Тела системы соединены друг с другом нитями, перекинутыми через блоки и намотанными на шкив 3 (или на шкив и каток); участки нитей параллельны соответствующим плоскостям. К одному из тел прикреплена пружина с коэффициентом жесткости c=300 Н/м. Под действием силы 𝐹 = 𝑓(𝑠)= 50(7+8s), зависящей от перемещения s точки ее приложения, система приходит в движение из состояния покоя; деформация пружины в начальный момент времени равна нулю. При движении на шкив 3 действует постоянный момент М=1,2 Н∙м сил сопротивления (от трения в подшипниках). Определить значение величины угловой скорости тела 3 ω3 в тот момент времени, когда перемещение s станет равным 𝑠1 = 0,2 м. Все катки, включая и катки обмотанные нитями, катятся по плоскостям без скольжения. Номер условия m1, кг m2, кг m3, кг m4, кг m5, кг с, Н/м М, Н·м F=f(s) Найти Номер рисунка 4 0 6 4 0 5 300 1,2 50(7+8s) ω3 9 Дано: m1=0 кг, m2=6 кг, m3=4 кг, m4=0 кг, m5=5 кг, М=1,2 Нм, с=300 Н/м, F=50(7+8s), 3=0,2 м, R3=0,3 м, r3=0,1, R4=0,2м, s1=0,2 м Найти: 3
Решение.
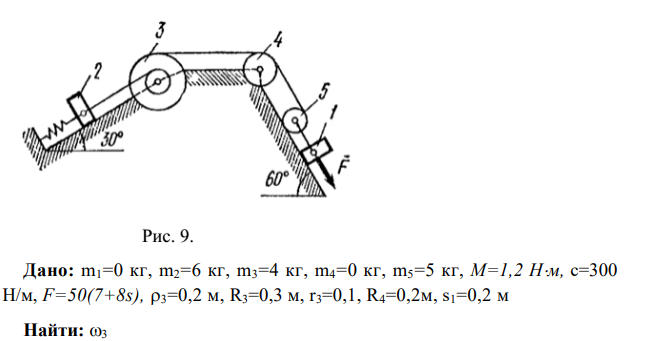
1. Рассмотрим движение неизменяемой механической системы, состоящей из весомых тел 2, 3, 5, и невесомого 4 соединенных нитями. Изобразим все действующие на систему внешние силы: активные F, P2, P3, P5, Fупр, момент сопротивления M, реакции N2, N3, N5 и силы трения Fтр2, Fтр5. Для определения 3 воспользуемся теоремой об изменении кинетической энергии системы 0 e T T A k (1) 2 Определяем Т0 и Т. Так как в начальный момент система находилась в покое, то Т0 = 0. Величина Т равна сумме энергий всех тел системы: T T T T 2 3 5 (2) P2 P5 P3 Fmp2 s1 М N5 N2 N3 Fynp К5 Fmp5 Учитывая, что тело 5 движется плоскопараллельно, тело 2 - поступательно, а тело 3 вращается вокруг неподвижной оси, получим 2 2 2 2 2 2 5 5 5 5 3 3 2 5 3 ; ; 2 2 2 2 m m I I c c T T T (3) Входящие в (3) моменты инерции имеют значения 2 5 5 2 5 3 3 3 ; 2 c m r I I m Тогда 2 2 2 2 2 5 5 5 5 3 3 3 3 3 2 5 5 5 3 3 ; 2 2 4 2 2 c c m I I m T m T (4) Все входящие сюда скорости следует выразить через искомую 3. Приняв во внимание, что точка K5 - мгновенный центр скоростей катка 5 и обозначив радиус катка через r5, получим 4 4 3 3 2 3 3 3 3 4 4 5 ; ; ; 2 2 c R R r R R (5) Подставив все величины (4) и (5) в равенство (3), а затем, используя


- В результате производственных технологических изменений объем производства в стране увеличился на 180 млрд. долл., при этом объем инвестиций возрос на 90 млрд. долл. Рассчитайте мультипликатор автономных расходов и предельную склонность к потреблению. Напишите соответствующие формулы и свои
- Бобров В.И., работающий в ЗАО «Союз» в цехс основного производства, с января по март получал заработную плату 6500 руб. , с апреля по декабрь - 7100 руб. 1 февраля он получил ссуду в организации 25 000 руб. на 6 месяцев из расчета 10% годовых, ставка ЦБ РФ - 16%. На иждивении Боброва В.И. дочь 19 лет, за обучение которой в отчетном году работник заплатил 25 000 руб.
- ферический заряд ТНТ (тринитротолуол) массой W (табл. 15) взрывается при стандартных атмосферных условиях. Найти параметры падающей (рис. 5) и нормально отражѐнной от препятствия
- Вопрос № 12 Осуществите гидрирование и полимеризацию алкена. Укажите катализаторы и инициаторы этих процессов, объясните их роль.
- Инвестор с капиталом в 100 000$ сформировал портфель из акций В и С c вектором весов w = (0,4;0,6). Найти стоимость портфеля через полгода. Инфляцию, дивиденды и налоги не учитывать
- В краткосрочном периоде совокупное предложение постоянно при уровне цен Р=2. Совокупный спрос задан уравнением У=2*M/Р. Предложение денег равно 1000. В результате ценового шока уровень цен поднялся до Р=2,5. Определите объем выпуска в условиях
- Задача Используя данные о величине товарооборота Т.Д. «Парус», рассчитать 1. Индивидуальные индексы выполнения плана. - физического объёма; - цены. 2. Общие индексы выполнения плана: - товарооборота; - физического объема; - цены. Исходные данные: Товары молоко кефир ряженка йогурт Предыдущий год 1800 490 150 2000 770 370 Отчетный год объем, кг цена, руб. объем, кгцена, руб. 110 155
- Определить долю чистого денежного потока в чистой прибыли организации по следующим исходным данным (тыс. руб.): Вариант 5 Период оборота денежных активов, дней 50 Средний остаток денежных средств 60 Полная себестоимость реализованной продукции 350 Чистый денежный поток 20
- Почему осадок MgNH4PO4 промывают не чистой водой, а разбавленным водным раствором аммиака? Почему осаждение Mg2+ в виде MgNH4PO4 ведут в присутствии NH4Cl?
- Задача Страна Фуджи является небольшой (она не может влиять на уровень мировых цен) и импортирует арахис по цене 10 ед. за мешок. Пусть на внутреннем рынке арахиса кривые спроса и предложения описываются уравнениями: D = 400 - 10P: S= 50 + 5P. Предположим, что правительство Фуджи хочет ограничить импорт арахиса до 50 мешков и вводит импортную квоту.
- По имеющимся данным о розничном товарообороте (табл.6) цепные и базисные показатели динамики, изобразить ряд динамики в виде линейного графика, сделать выводы. Таблица 6 ПЕРИОД, год 2004 2005 2006 2007 2008 2009 Товарооборот, тыс. руб 18,82 87,43 67,68 88,68 199,1 195,6
- Чёрный осадок сульфида свинца(II) массой 95,6 г обрабатывают раствором пероксида водорода объёмом 300 мл и плотностью 1,1222 г/см3 , содержащим 30 % Н2О2. Цвет осадка меняется на белый.
- Ежемесячные расходы семьи на потребление равны 100 тыс. руб. плюс объема располагаемого дохода (ЛРД) за месяц (С = 100 тыс. руб. + (1/2 (1/2)*ЛРД). По данным таблицы рассчитайте расходы семьи на потребление и величину
- По договору №18 от 12.06.14 г. были приобретены материалы у иностранного поставщика. В соответствии с договором их стоимость составляет 5900S. Оплата производится по курсу ЦБ РФ на дату перечисления средств Право собственности на материалы переходит на дату отгрузки их поставщиком первому перевозчику.