
Ирина Эланс
. Техническое задание Спроектировать оптическую систему прибора, предназначенного для наблюдения за гнездом скворца диаметром D=26 см и части ветки дерева длиной l=0,95 м. Гнездо находится на дереве высотой H=12,39 м. Наблюдение ведется с расстояния L=6 м и h= 2 м в дневное время. (Решение → 10715)
. Техническое задание
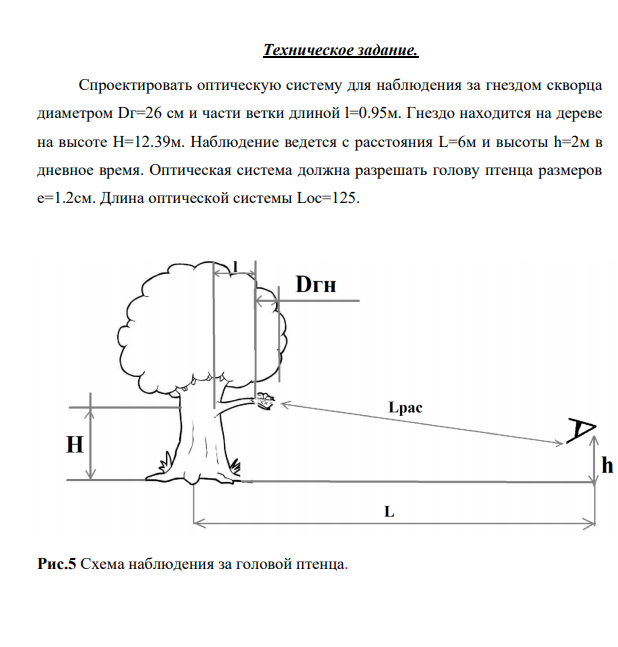
Спроектировать оптическую систему прибора, предназначенного для наблюдения за гнездом скворца диаметром D=26 см и части ветки дерева длиной l=0,95 м. Гнездо находится на дереве высотой H=12,39 м. Наблюдение ведется с расстояния L=6 м и h= 2 м в дневное время.
![]()
![]()
![]()
Спроектировать оптическую систему прибора, предназначенного для наблюдения за гнездом скворца диаметром D=26 см и части ветки дерева длиной l=0,95 м. Гнездо находится на дереве высотой H=12,39 м. Наблюдение ведется с расстояния L=6 м и h= 2 м в дневное время.



9.PNG


- Техническое задание Спроектировать прибор для визуального слежения за сближением ракеты с целью, которое происходит на высоте 90 км и в 50 км по горизонту от пункта наблюдения и в плоскости, перпендикулярной линии наблюдения. Слежение должно начинаться при удалении ракеты от цели в 8,0 км. Прибор должен отчетливо уловить отклонения ракеты от цели в 50 м. Длина оптической системы (тонкой) 270 мм. Коэффициент виньетирования Kω=0,5. Ось окуляра должна быть горизонтальна. Рефракцию в атмосфере не учитывать. Наблюдения ведутся в дневное и сумеречное время суток. Материал призмы БК10.
- Техническое задание. Спроектировать прибор для визуального слежения за сближением ракеты с целью, которое происходит на высоте H=60 км и в S=53 км по горизонту от пункта наблюдения и в плоскости, перпендикулярной линии наблюдения. Слежение должно начинаться при удалении ракеты от цели в ΔS=5,6 км. Прибор должен отчетливо уловить отклонения ракеты от цели в Smin=60 м. Длина оптической системы (тонкой) L=300 мм. Коэффициент виньетирования Kω=0,5. Ось окуляра должна быть горизонтальна. Рефракцию в атмосфере не учитывать. Наблюдения ведутся в дневное и сумеречное время суток. Материал призмы БК10.
- Техническое задание. Спроектировать прибор для визуального слежения за сближением ракеты с целью, которое происходит на высоте Н=36 км и в S=20 км по горизонту от пункта наблюдения и в плоскости, перпендикулярной линии наблюдения. Слежение должно начинаться при удалении ракеты от цели вS=2 км.Прибор должен отчетливо уловить отклонения ракеты от цели вSmin=30 м.Длина оптической системы(тонкой)L=245мм.Коэффициент виньетированияkw=0,5.Ось окуляра должна быть горизонтальна.Рефракцию в атмосфере не учитывать.Наблюдения ведутся в дневное и сумеречное время суток.Материал призмы БК6.
- Техническое предложение на оказание услуг Наименование и адрес Участника конкурса: Федеральное государственное бюджетное образовательное учреждение высшего профессионального образования «Московский государственный технический университет имени Н.Э. Баумана » 105005, г. Москва, ул. 2-я Бауманская, д. 5, стр. 11. Краткое описание объекта разработки и проводимых исследований.2. Назначение объекта разработки и проводимых исследований.3. Описание работ, которые необходимо выполнить.4. Описание планируемых результатов работы.5. Информация о предполагаемом внедрении и возможностях дальнейшего использования.
- Технологическая разработка отливки и штамповки для детали "Втулка"
- «Технологическое обеспечение требований чертежа детали обработкой резанием » Анализ исходных данных и технических требований по чертежу делали:Деталь-тело вращения, с соотношением l/d=145/67 < 3 ,что соответствует жесткой конструкции. Материал: Сталь40Х . Тип производства - единичное.Поверхность А – резьбовая внутренняя М6 , шероховатость Ra не более 6,3 мкм; Допуск размера по квалитету 12.Допуск формы на чертеже не указан.Поверхность Б – плоская (шпоночное соединение) , шероховатость Ra не более 6,3 мкм; Допуск размера по квалитету 12.Допуск формы на чертеже не указан.Поверхность В –цилиндрическая наружная ( проточка) , шероховатость Ra не более 6,3 мкм; Допуск размера по квалитету 12.Допуск формы на чертеже не указан.2.Выбор способа обработки.Поверхность А – сверление, нарезание резьбы.Поверхность Б –фрезерование черновое. Поверхность В – точение получистовое.
- Технологическое проектирование гибкой производственной системы для обработки деталей типа «Вал – шестерня » , домашнее задание №2
- Техническое задание Проектирование и исследование механизмов мотороллера. Механизмы движения мотороллера объединяют одноцилиндровый двухтактный двигатель внутреннего сгорания и вспомогательные устройства: механизм газораспределения и механизм привода вентилятора (рис.79). Основным механизмом двигателя является кривошипно-ползунный (рис.79а), который состоит из кривошипа 1, шатуна 2 и поршня 3. Диаграмма изменения давления в цилиндре 4 двигателя (рис.79б) строится по данным табл. 79-2.Рабочий цикл двухтактного двигателя осуществляется за один оборот кривошипа. Управление газораспределением д.в.с. осуществляется кулачковым механизмом, состоящим из кулачка 5 и толкателя 6 с роликом 7, воздействующим на выпускной клапан 8. Для прижима ролика к кулачку используется цилиндрическая пружина 9. Движение распределительного вала обеспечивается парой зубчатых колес 10 и 11, передаточное отношение которой i10-11=1.Закон изменения ускорения толкателя в пределах рабочего угла поворота fраб кулачка показан на рис. 79в. Для привода вентилятора 15 охлаждения д.в.с. использован планетарный редуктор 12-13-14 (рис.79г) с числом сателлитов k=3. Запуск двигателя начинается с нижней мертвой точки 1=0, с начала участка сжатия при начальной угловой скорости вращения ω1нач=0 и производится вручную моментом запуска . Можно считать, что необходимый для запуска крутящий момент не зависит от угла поворота кривошипа и равен максимальному значению приведенного момента силы давления сжатия.
- ТЕХНИЧЕСКОЕ ЗАДАНИЕ ПРОЕКТИРОВАНИЕ И ИССЛЕДОВАНИЕ МЕХАНИЗМОВ МОТОРОЛЛЕРА. Механизмы движения мотороллера объединяют одноцилиндровый двухтактный двигатель внутреннего сгорания и вспомогательные устройства: механизм газораспределения и механизм привода вентилятора (рис.79). Основным механизмом двигателя является кривошипно-ползунный (рис.79а), который состоит из кривошипа 1, шатуна 2 и поршня 3. Диаграмма изменения давления в цилиндре 4 двигателя (рис.79б) строится по данным табл. 79-2. Рабочий цикл двухтактного двигателя осуществляется за один оборот кривошипа. Управление газораспределением д.в.с. осуществляется кулачковым механизмом, состоящим из кулачка 5 и толкателя 6 с роликом 7, воздействующим на выпускной клапан 8. Для прижима ролика к кулачку используется цилиндрическая пружина 9. Движение распределительного вала обеспечивается парой зубчатых колес 10 и 11, передаточное отношение которой i10-11=1. Закон изменения ускорения толкателя в пределах рабочего угла поворота φраб. кулачка показан на рис. 79в. Для привода вентилятора 15 охлаждения д.в.с. использован планетарный редуктор 12-13-14 (рис.79г) с числом сателлитов k=3. Запуск двигателя начинается с нижней мертвой точки φ 1=0, с начала участка сжатия при начальной угловой скорости вращения ω1нач=0 и производится вручную моментом запуска Мзап пр . Можно считать, что необходимый для запуска крутящий момент Мзап пр не зависит от угла поворота кривошипа и равен максимальному значению приведенного момента силы давления сжатия.
- Техническое задание. Проектирование и исследование механизмов плунжерного насоса. Вертикальный одноцилиндровый плунжерный насос простого действия предназначается для перекачки жидкостей. Основной механизм насоса - кривошипно-ползунный, состоящий из трёх звеньев: 1 - кривошип, 2 - шатун, 3 – плунжер. Рабочий процесс в цилиндре совершается за один оборот кривошипа 1. При движении плунжера вверх происходит всасывание жидкости в цилиндре при давлении Pmin, близком к атмосферному (Pmin=0), при движении плунжера вниз - нагнетание жидкости в трубопровод 5 при давлении Pmax (см. индикаторную диаграмму насоса рис.63б). Коленчатый вал 1 кривошипно-ползунного механизма приводится во вращение от электродвигателя 6 через зубчатую передачу 7,8 с неподвижными осями колёс и планетарный редуктор 9, 10, 11, 12 (рис. 63в). Для обеспечения требуемой неравномерности движения на кривошипном валу 1 закреплён маховик 13 (см. рис. 63в). Схема кулачкового механизма 14-15 представлена на рис. 63г. Схематичное изображение закона изменения ускорения толкателя 15 дано на рис.63д
- Техническое задание Проектирование и исследование механизмов сильфонного поршневого компрессора. Вертикальный одноцилиндровый поршневой компрессор служит для сжатия химически активных газов. Приводится он в движение от электродвигателя 7 (с жесткой механической характеристикой) через зубчатые колёса с числами зубьев z1 и z2 и планетарный одноступенчатый редуктор 8. Рабочая полость компрессора изолирована от картера компрессора, редуктора и двигателя с помощью сильфона 6, один конец которого припаян к поршню 3, а другой конец - к корпусу компрессора. Для охлаждения цилиндра служит радиатор, обдуваемый газом из общей для объекта системы охлаждения. Изменение давления P газа в цилиндре от хода поршня характеризуется индикаторной диаграммой, данные для построения которой даны в таблице 2. Изменение усилия P, приложенного к поршню от сильфона при его растяжении и сжатии в зависимости от хода поршня, показано на диаграмме. Основной механизм компрессора кривошипно-ползунный. Он состоит из коленчатого вала 1, шатуна 2 и ползуна (поршня). Противовесы 12 на коленчатом валу частично уравновешивают механизм, уменьшая усилия в подшипниках. На коленчатом валу установлен кулачок 9 механизма отсчёта оборотов, качающийся толкатель 11 которого приводит включение контактов счётчика оборотов. При проектировании и исследовании механизмов компрессора пользоваться исходными данными из таблицы 1.
- Техническое задание Разработать преобразователь последовательного кода в параллельный. Количество разрядов входной шины – 1. Скорость входной шины – 1 Мбод. Количество разрядов выходной шины – 8. Скорость выходной шины – 20 Мбайт/c. Контроль осуществить по методу четности. Количество байт в кадре – 36. Каждый байт кадра обрамляет 1 стартовый бит, 1 стоповый. Объектом разработки данной работы является модуль преобразователя последовательного кода в параллельный с контролем принимаемой информации по четности. Целью работы являлось создание комплекта конструкторской документации законченного модуля. Целью разработки являлось проектирование функционально законченного устройства, построенного на интегральных микросхемах, удовлетворяющего заданным техническим заданием требованиям, и разработка необходимой конструкторской и технической документации на проектируемое устройство. При проектировании были решены следующие задачи: анализ объекта разработки на функциональном уровне, разработка функциональной схемы модуля, выбор элементной базы для реализации объекта, поиск схемотехнических решений, расчет временных и электрических параметров.
- Техническое задание: Разработать схему арифметико-логического устройства, выполняющего операцию извлечения корня из целого числа разрядностью 17 бит. АННОТАЦИЯ Разработана схема электрическая функциональная, принимающая на вход целое положительное число разрядностью 17 бит и отдающая на выход квадратный корень из этого числа, округленный до целого в меньшую сторону
- Техническое задание Спроектировать оптическую систему для наблюдения за гнездом скворца диаметром Dг = 35 см и части ветки дерева длиной l. Гнездо находится на дереве на высоте Н. Наблюдение ведется с расстояния L и высоты h в дневное время.