
Ирина Эланс
2022г Вариант 10 - ДЗ №4 - Волны Зачтено на максимальный баллЗадача 4-2 для вариантов с 7 по 17Для стержня длиной l , закреплённого, как указано на рис. 35 - 40, необходимо: - Вывести формулу для возможных частот продольных волн, возбуждаемых в стержне, при которых в нём образуется стоячая волна;- Указать какая частота колебаний является основной, а какие частоты относятся к обертонам (к высшим гармоникам);- Определить частоту и длину волны i-ой гармоники;- Для этой гармоники нарисовать вдоль стержня качественную картину:а) Стоячей волны амплитуд смещений;б) Стоячей волны амплитуд деформаций.Исходные данные для каждого варианта задачи представлены в таблице № 17.№ вар.Вид крепленияМатериалПлотностьρ, 103 кг/м3Модуль ЮнгаЕ, 1010ПаДлинаl, мОпределитьi-ю гармонику10Рис 38.Стекло2,5611 (Решение → 267)
2022г Вариант 10 - ДЗ №4 - Волны
Зачтено на максимальный балл
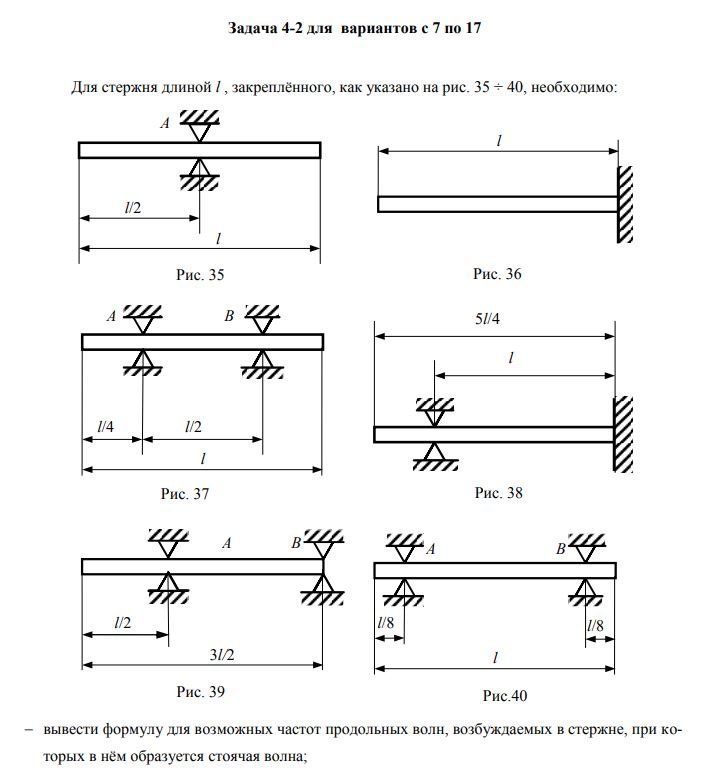
Задача 4-2 для вариантов с 7 по 17
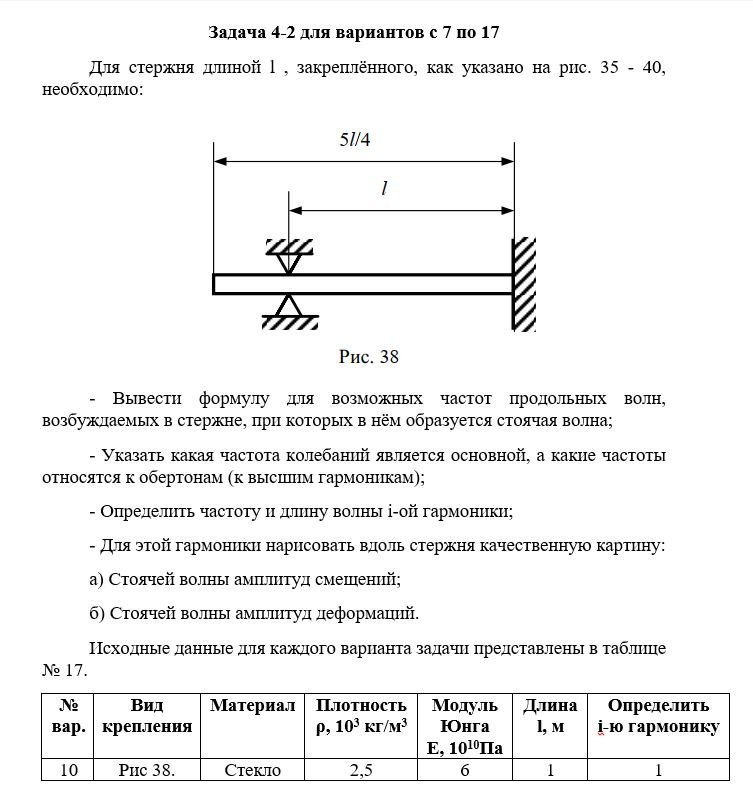
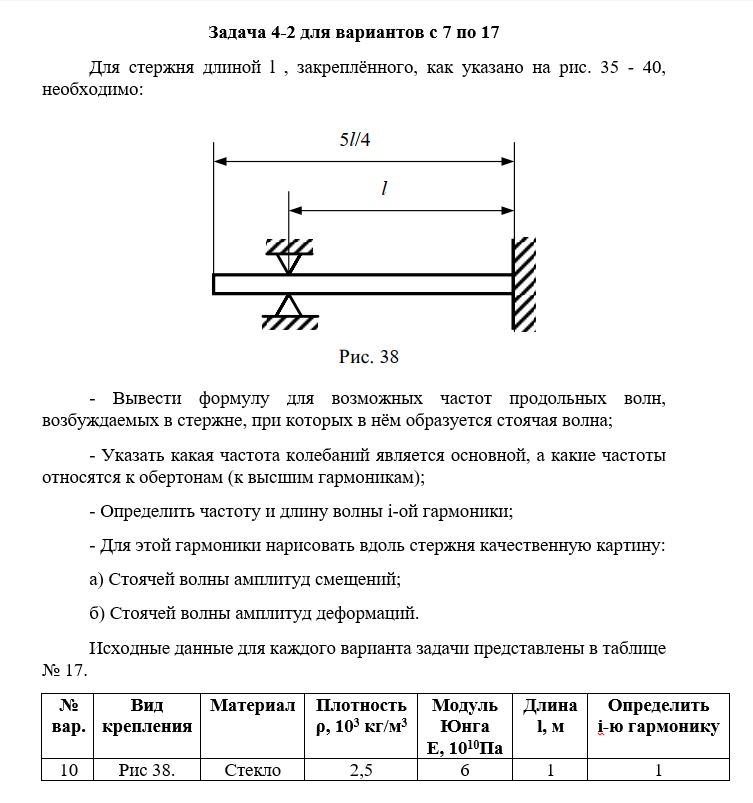
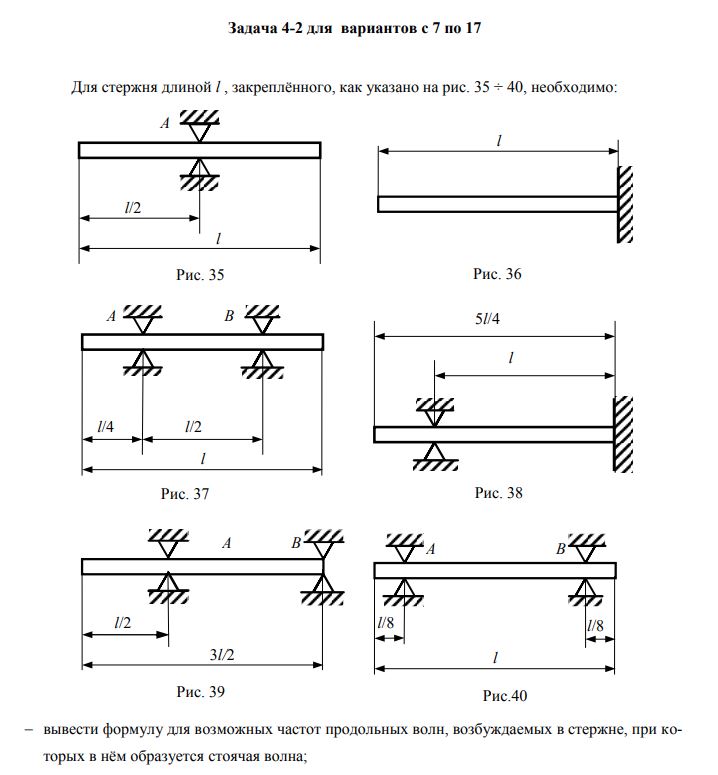
Для стержня длиной l , закреплённого, как указано на рис. 35 - 40, необходимо:
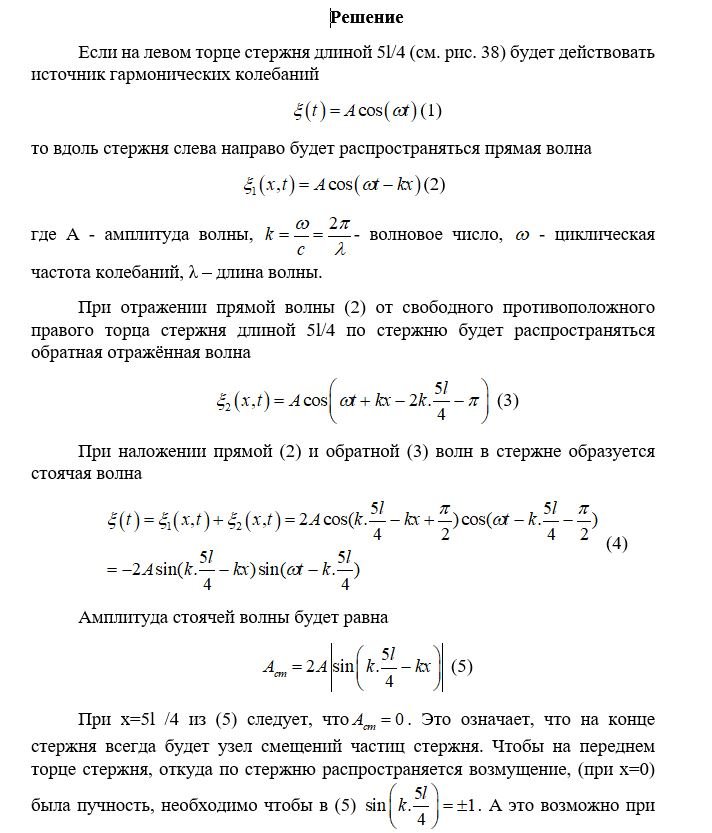
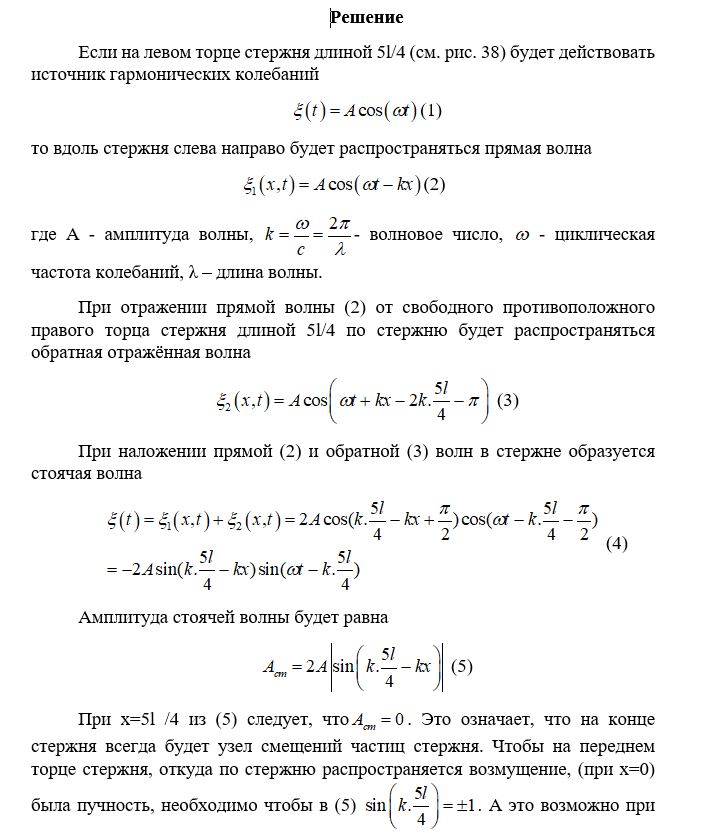
- Вывести формулу для возможных частот продольных волн, возбуждаемых в стержне, при которых в нём образуется стоячая волна;
- Указать какая частота колебаний является основной, а какие частоты относятся к обертонам (к высшим гармоникам);
- Определить частоту и длину волны i-ой гармоники;
- Для этой гармоники нарисовать вдоль стержня качественную картину:
а) Стоячей волны амплитуд смещений;
б) Стоячей волны амплитуд деформаций.
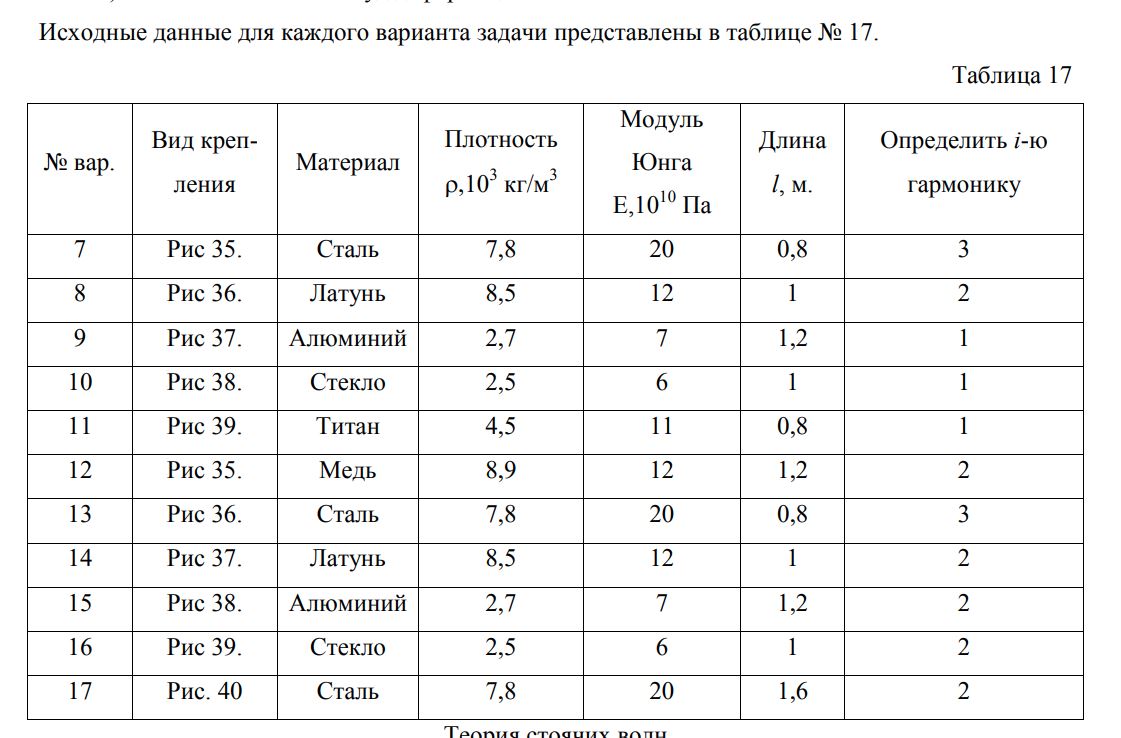
Исходные данные для каждого варианта задачи представлены в таблице № 17.
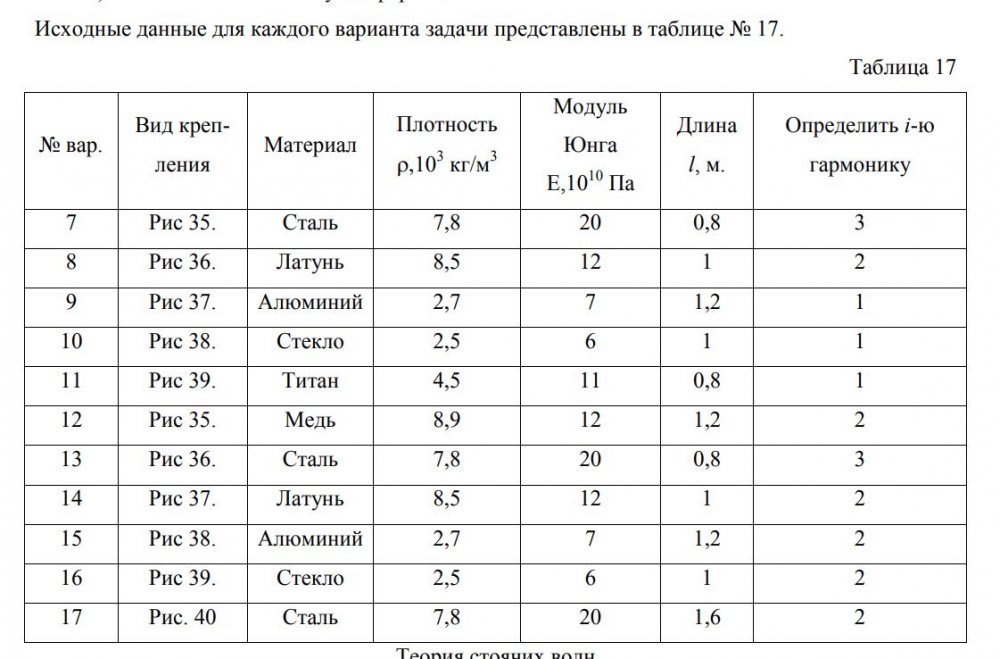
№ вар. | Вид крепления | Материал | Плотность ρ, 103 кг/м3 | Модуль Юнга Е, 1010Па | Длина l, м | Определить i-ю гармонику |
10 | Рис 38. | Стекло | 2,5 | 6 | 1 | 1 |
1.JPG
2.JPG
Capture.JPG
Capture1.JPG


- 2022г Вариант 10 - ДЗ - Определение УЗД Зачетно на максимальный баллВариант 10 - ДЗ - Определение УЗДУсловие Определить УЗД (уровни звукового давления) в расчетной точке при заданных уровнях звуковой мощности источников (Lp=f(fсг)) (источники ненаправленные), указанном расположении расчетной точки относительно источников шума, габаритных размерах промышленного помещения. Максимальный габарит любого источника много меньше расстояния до расчетной точки. Полученные данные сравнить с нормативными значениями (СН 2.2.4/2.1.8.562-96). Построить расчетный и предельный спектры. Сделать выводы о необходимости защитных мероприятий. Предложить защитные мероприятия.Примечание: постоянную помещения В определить в соответствии с назначением помещения и его объемом по СНиП II-12-77ВариантСхема расположения расчетной точки относительно источников шума (приложение 1)Расположение источников в пространствеРасстояния от источника до расчетной точки, мУровни звуковой мощности источников,(Lp=f(fсг))(приложение 2)Габаритные размеры промышленного помещения, А*В*С, м310Схема 21– подвешен2,3 – на полуR1=9R2=9R3=91 - 32 - 103 - 1115х30х4Схема расположения расчетной точки относительно источников шума в помещении.Уровни звуковой мощности источников шума:№, п/п ,дБ631252505001000200040008000181828384838180772909198999793918638278847690828978
- 2022 г Вариант 10 - Типовой расчет №1 - Элементарные функции и их графики Зачтено на максимальный балл
- 2022г Вариант 111 - ДЗ №3 - Устойчивость сжатых стержней Зачтено на максимальный балл
- 2022г Вариант 11 - ДЗ №1 + ДЗ №2 - Динамика материальной точки - Динамика вращательного движения Защищено в сумме на 20 из 20 возможных баллов Условие: Гладкая частица сферической формы массой m, которую можно рассматривать как материальную точку, ударяется со скоростью о гладкую массивную преграду, которая движется со скоростью . Угол, образованный векторами и , равен . Массу преграды считать бесконечной. На рис. 5, 6 преграда имеет форму плоской стенки, на рис.7 – форму острого конуса с углом раствора γ, а на рис. 8 – форму конуса сферической головной частью радиусом R. Удар частицы о сферическую поверхность происходит в точке А, расположенной под углом γ относительно оси преграды. При этом АО = R. Виды взаимодействия: а) абсолютно упругий удар (АУУ); б) неупругий удар (НУУ); в) абсолютно неупругий удар (АНУУ). Обозначения: - конечная скорость частицы после удара; αк - угол, образованный векторами и ; - изменение вектора скорости частицы за время удара; - изменение модуля импульса частицы за время удара; ΔE - изменение кинетической энергии частицы за время удара; F - модуль средней силы, с которой частица действует на стенку во время удара; F.Δt - модуль импульса силы, который за время удара Δt частица передаёт стенке; - энергия деформирования частицы при ударе, выраженная через её начальную кинетическую энергию, где - безразмерный коэффициент. Однородный жёсткий вертикальный стержень длиной l=1 м и М=1 кг, движущийся поступательно в плоскости рисунка с постоянной горизонтальной скоростью V0, налетает на край массивной преграды (рис. 1). После удара стержень вращается вокруг оси O перпендикулярной плоскости рисунка. Ось вращения стержня совпадает с ребром преграды и проходит через точку контакта стержня с преградой, так что точка контакта лежит выше центра тяжести стержня (рис. 14). Потерями механической энергии при вращении стержня после удара пренебречь. Другие обозначения: l1 – расстояние от верхнего конца стержня до точки контакта; ω0 – угловая скорость стержня сразу после удара о ребро преграды; V0m – минимальная горизонтальная скорость стержня, а ω0m – соответственно минимальная угловая скорость стержня, при которой он после удара способен коснуться горизонтальной поверхности преграды; φm – максимальный угол поворота стержня после удара; ωК – угловая скорость стержня в момент его удара о горизонтальную поверхность преграды. Расчет следует начинать с определения характерной скорости V0m
- 2022г Вариант 11 - ДЗ №1 - Динамика материальной точки Зачтено на максимальный баллУсловие: Гладкая частица сферической формы массой m, которую можно рассматривать как материальную точку, ударяется со скоростью о гладкую массивную преграду, которая движется со скоростью . Угол, образованный векторами и , равен . Массу преграды считать бесконечной. На рис. 5, 6 преграда имеет форму плоской стенки, на рис.7 – форму острого конуса с углом раствора γ, а на рис. 8 – форму конуса сферической головной частью радиусом R. Удар частицы о сферическую поверхность происходит в точке А, расположенной под углом γ относительно оси преграды. При этом АО = R. Виды взаимодействия: а) абсолютно упругий удар (АУУ); б) неупругий удар (НУУ); в) абсолютно неупругий удар (АНУУ). Обозначения: - конечная скорость частицы после удара; αк - угол, образованный векторами и ; - изменение вектора скорости частицы за время удара; - изменение модуля импульса частицы за время удара; ΔE - изменение кинетической энергии частицы за время удара; F - модуль средней силы, с которой частица действует на стенку во время удара; F.Δt - модуль импульса силы, который за время удара Δt частица передаёт стенке; - энергия деформирования частицы при ударе, выраженная через её начальную кинетическую энергию, где - безразмерный коэффициент.
- 2022г Вариант 11 - ДЗ №1 - Определённый интегралИнтегралы и дифференциальные уравнения (2-й семестр)Зачтено на максимальный балл
- 2022г Вариант 11 - ДЗ №1 - Статически неопределимые задачи изгиба - Задача 1+2Зачтено на максимальный баллПроизвести расчет балки при упругих деформациях а) Раскрыть статическую неопределимость и построить эпюры Qy и Mx б) Определить допускаемую нагрузку в) Примерный вид упругой линии балки
- 2022г Вариант 10 - ДЗ №3 + ДЗ №4 - Колебания + Волны Зачтено на максимальный баллВариант 10 - ДЗ №3 - Колебания Каждая колебательная система (КС), представленная на рис. 28, 29, 30, 31, состоит из шайбы массой m и двух упругих пружин, имеющих жесткости k1 и k2 . Движение КС происходит в окружающей среде с малыми вязкими свойствами (малым коэффициентом сопротивления r). На рис. 28, 30 шайба колеблется под действием пружин, соединенных параллельно, а на рис. 29, 31 колебания происходят под действием пружин, соединенных последовательно. Массой пружин можно пренебречь. На рис. 28, 29 КС имеет горизонтальное расположение, а на рис. 30, 31 вертикальное расположение в поле силы тяжести. Длины 1-ой и 2-ой пружин в недеформированных состояниях равны l10 и l20. На рис.28, 30 L - длина каждой пружины в деформированном состоянии при t=0. На рис.29, 31 L - общая длина двух пружин в деформированном состоянии при t=0. Возможные векторы начальной скорости шайбы равны V1, V2. Шайбу, находящуюся в положении равновесия, смещают до расстояния L, а затем импульсом придают ей в начальный момент времени t=0 скорость V1 или V2 , в соответствии с заданием (см. таблицы №10 - 13). В результате КС приходит в колебательное движение. Варrk1k2ml10l20LV1V2102r*1,2k*k*1,5m*1,1l*1,1l*1,2l*0,5U* 2022г Вариант 10 - ДЗ №4 - Волны Зачтено на максимальный баллЗадача 4-2 для вариантов с 7 по 17 Для стержня длиной l , закреплённого, как указано на рис. 35 - 40, необходимо: - Вывести формулу для возможных частот продольных волн, возбуждаемых в стержне, при которых в нём образуется стоячая волна; - Указать какая частота колебаний является основной, а какие частоты относятся к обертонам (к высшим гармоникам); - Определить частоту и длину волны i-ой гармоники; - Для этой гармоники нарисовать вдоль стержня качественную картину: а) Стоячей волны амплитуд смещений; б) Стоячей волны амплитуд деформаций. Исходные данные для каждого варианта задачи представлены в таблице № 17. № вар.Вид крепленияМатериалПлотность ρ, 103 кг/м3Модуль Юнга Е, 1010ПаДлина l, мОпределить i-ю гармонику10Рис 38.Стекло2,5611
- 2022г Вариант 10 - ДЗ №3 - Динамические реакции подшипников Зачтено на максимальный балл
- 2022г Вариант 10 - ДЗ №3 - Исследование функций - Задача 1+2+3+5 Зачтено на максимальный балл
- 2022г Вариант 10 - ДЗ №3 - Кинематика сложного движения точкиЗачтено на максимальный баллВариант 10. Ползун E, двигаясь в горизонтальных направляющих с постоянной скоростью VE , приводит в движение шарнирно связанные между собой стержни 1 и 3. Стержень - толкатель 3, двигаясь в направляющих N и N1, приводит во вращательное движение вокруг оси O1(z1), перпендикулярной плоскости рисунка, кулачок 2. Кулачок 2 представляет собой диск с эксцентриситетом е. В прямолинейном пазе кулачка 2 движется точка М по закону M0M = 0,4t -0,1t 2 . Принять α = 30°, VE =0,2 м/с, r = 0,2 м, е=0,5r, СЕ=2r. Для момента времени t = 1 c определить: 1) угловые скорость и ускорение звена, несущего на себе точку М, а также относительное ускорение точки D (по отношению к звену 2); 2) абсолютные скорость и ускорение точки M.
- 2022г Вариант 10 - ДЗ №3 - Колебания Зачтено на максимальный баллВариант 10 - ДЗ №3 - КолебанияКаждая колебательная система (КС), представленная на рис. 28, 29, 30, 31, состоит из шайбы массой m и двух упругих пружин, имеющих жесткости k1 и k2 . Движение КС происходит в окружающей среде с малыми вязкими свойствами (малым коэффициентом сопротивления r). На рис. 28, 30 шайба колеблется под действием пружин, соединенных параллельно, а на рис. 29, 31 колебания происходят под действием пружин, соединенных последовательно. Массой пружин можно пренебречь. На рис. 28, 29 КС имеет горизонтальное расположение, а на рис. 30, 31 вертикальное расположение в поле силы тяжести. Длины 1-ой и 2-ой пружин в недеформированных состояниях равны l10 и l20. На рис.28, 30 L - длина каждой пружины в деформированном состоянии при t=0. На рис.29, 31 L - общая длина двух пружин в деформированном состоянии при t=0. Возможные векторы начальной скорости шайбы равны V1, V2. Шайбу, находящуюся в положении равновесия, смещают до расстояния L, а затем импульсом придают ей в начальный момент времени t=0 скорость V1 или V2 , в соответствии с заданием (см. таблицы №10 - 13). В результате КС приходит в колебательное движение.Варrk1k2ml10l20LV1V2102r*1,2k*k*1,5m*1,1l*1,1l*1,2l*0,5U*
- 2022г Вариант 10 - ДЗ №3 - Уравнения Лагранжа 2-го рода Зачтено на максимальный балл10. Штанга 2 механического манипулятора, масса которой равна m2, движется в горизонтальных направляющих, установленных на неподвижной стойке 4. К штанге в точке O шарнирно прикреплен рычаг 1 со схватом 3. Масса рычага со схватом m1, его центром масс является точка A (OA = l ). Момент инерции рычага со схватом относительно оси, проходящей через точку O перпендикулярно плоскости рисунка, равен J. К рычагу 1 и штанге 2 присоединены концы спиральной пружины 5 и демпфер 6. Коэффициент жесткости пружины с. Приводы манипулятора создают пару сил с постоянным моментом M, приложенную к рычагу 2, и постоянную силу F , приложенную к штанге 2.
- 2022г Вариант 10 - ДЗ №3 - Электромагнитная индукция Зачтено на максимальный баллУсловие: По двум гладким медным шинам скользит перемычка массы M, закон движения которой задан Y = f(t). Сопротивление перемычки равно , поперечное сечение S, концентрация носителей заряда (электронов) в проводнике перемычки равна . Сверху шины замкнуты электрической цепью, состоящей из конденсатора ёмкости С. Расстояние между шинами l. Система находится в однородном переменном магнитном поле с индукцией B(t), перпендикулярном плоскости, в которой перемещается перемычка. Сопротивление шин, скользящих контактов, а также самоиндукция контура пренебрежимо малы. Ток через конденсатор в начальный момент времени равен 0.