
Ирина Эланс
Кинематический анализ Аналитическим методом В соответствии с требованиями Люминарского И.Е. Точно по его методичке Зачтено на максимальный балл (Решение → 7415)
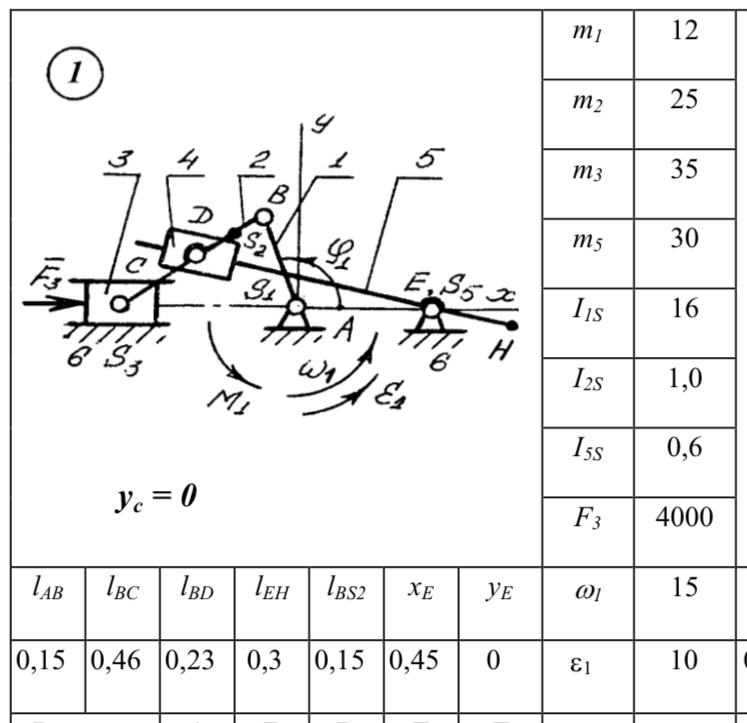
Кинематический анализ Аналитическим методом
В соответствии с требованиями Люминарского И.Е.
Точно по его методичке
Зачтено на максимальный балл
В соответствии с требованиями Люминарского И.Е.
Точно по его методичке
Зачтено на максимальный балл
attachment.png


- Кинематический анализ верный, а силовой нет
- Кинематический анализ в компасе 16В
- Кинематический анализ механизма.
- Кинематический анализ механизма, где угол фи1 равен 120 градусов. В архиве 3 файла: расчет к механизму, план скоростей и ускорений, cdw-чертеж, выполненный в компасе
- Кинематический анализ механизма Принятo Барышниковой О.О. на отлично Очень подробно расписано, все необходимые чертежи имеются Работа выполнена на миллиметровке А3 Фото отличного качества P.S. Последующие работы опубликую, как сдам их ей(дабы удостовериться в их правильности)) Ссылки на зачтенные ДЗ => ДЗ-1 Вариант А(60град) Принято Барышниковой О.О. на отлично 2021г - СтудИзба - студенческая социальная сеть (studizba.com) ДЗ-3 Вариант А(60град) Силовой расчет механизма; Барышникова зачла на максимум 2021г - СтудИзба - студенческая социальная сеть (studizba.com)
- Кинематический анализ механизма Принято Люминарским С. Е. на отлично Очень подробно расписано Все необходимые чертежи и таблицы имеются Фото отличного качества Ссылка на зачтенное ДЗ-1 => ДЗ-1 Вариант А(60град) 2021г - СтудИзба - студенческая социальная сеть (studizba.com)
- Кинематический анализ механизма, расчет скоростей и ускорений, планы скоростей и ускорений, зачтеннаяработа
- кинематика точки и простейшие движения твердого тела
- Кинематика точки и простейшие движения твёрдого тела
- Кинематика точки и простейшие движения твёрдого тела 1) по заданному движению механизма (см.варианты заданий) получить уравнения движения точки M координатныым способом (в декартовой или полярной системе координат, указанной на схеме варианта);2) определить траекторию движения точки M .Для момента времени t =t1 :3) найти скорость v и ускорение a точки M ;4) определить проекции скорости v и ускорения a точки M на оси декартовой системы координат;5) найти касательную aт и нормальную an составляющие ускорения, радиус кривизны ртраектории в данном положении точки M ;6) найти радиальные и трансверсальные составляющие скорости и ускоре-ния точки M. Начало полярной системы координат нужно поместить в началодекартовой, направив полярную ось по осиOx;7) в выбранном масштабе выполнить чертеж с изображением траектории движения точки M. На чертеже указать все составляющие скорости и ускорения точки M в момент времениt = t1 . 1) установить вид движения звеньев механизма.Для момента времени t = t1 ;2) определить угловые скорости и угловые ускорения звеньевмеханизма, совершающих вращательное движение, указав на чертеже круговы-ми стрелками их направления, определить характер движения тел (замедленный или ускоренный);3) определить скорости v и ускорения a тел при поступательномдвижении;4) для точек контакта телAi (i - номер звена) определить скорости, ускорения и изобразить их на схеме механизма в соответствующем масштабе
- Кинематика точки и простейших движений твёрдого тела
- Кинематика точки. Кинематика простейших движений твердого тела. Подписано к защите.
- Кинематические расчеты:Материалы и обработка:Определение предварительного межосевого расстояния:Допускаемые напряжения:Расчет коэффициентов нагрузки:Определение размеров и параметров зубчатых колес:Проверочный расчет на контактную выносливость:Проверочный расчет на выносливость при изгибе:Определение геометрических параметров передачи:Проверка возможности обеспечения принятых механических Силы действующие на валы от зубчатых колес:
- Кинематический анализ. 57 вариант. Все зачтенное, сделано идеально. Вариант Г 120 градусов