
Ирина Эланс
Ммвка кинемат анализ механизма вариант 56Г (угол 120 град) (Решение → 7623)
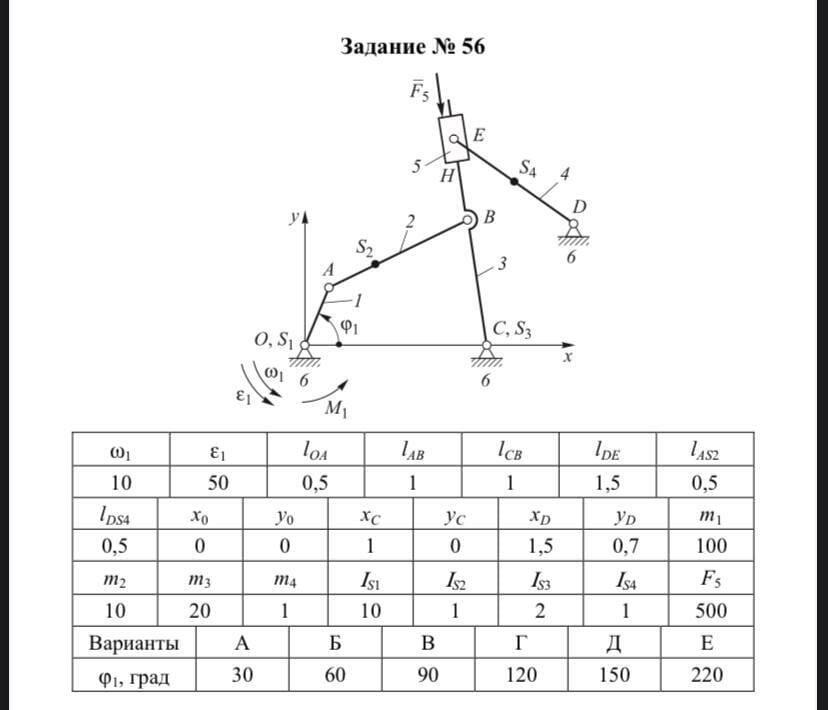
Ммвка кинемат анализ механизма вариант 56Г (угол 120 град)
qfqtxduz6uw.jpg


- Много сделанных номеров из учебника "Английский в эпоху цифровых технологий 2 часть" не все, но много, + еще можете найти что-то полезное в документах ворда.
- Многоугольники на миллиметровке, как и весь механизм.
- Многоцелевой станок ИР320ПМФ4 с комбинированной системой числового программного управления, автоматической сменой инструмента и обрабатываемых деталей предназначен для обработки малогабаритных корпусных деталей особо сложной конфигурации. По особому заказу за отдельную плату станки ИР320ПМФ4 изготовляются по классу точности А ОСТ2 Н72-6—81 для обработки особо точных корпусных деталей и в исполнении с накопителем на 12 позиций. Станок ИР320ПМФ4 предназначен для внутренних и экспортных поставок, в том числе для поставки в страны и районы с тропическим климатом
- Модели, сборка, сборочный чертеж
- Модели, сборка, сборочный чертеж
- Модели, Чертежи деталей, Сборка, Спецификация (там несколько вариантов каждой детальки и сборки) среди них правильные и неправильные:)
- Моделька и чертёж штуцера на образец, можете поставить свои размеры и срисовать ручками на свой эскиз. 18 инвентор, пользуйтесь, зелёные
- Метод перемещений с исправлениями (Правые листы - то, что скидывалось на проверку. На левых листах - исправление) Преподаватель - Дружинин П.В.
- Метрология, стандартизация и сертификация, 1ое дз в формате PDF
- Механизм карбюраторного двухтактного двигателя привода (Рис. 1.1) состоит из кривошипа 1, шатуна 2 и поршня 3, который движется внутри цилиндра, имеющего наружные ребра для охлаждения. Сжатая смесь в цилиндре в верхней мертвой точке (ВМТ) поджигается электрической искрой от свечи 6. Под действием горячих газов, находящихся под большим давлением, поршень движется вниз; в конце хода поршня открываются выхлопное окно 5, а затем продувочное окно 4; сжатая в карете двигателя рабочая смесь вновь наполняет цилиндр и сжимается при ходе поршня вверх. Вращение от кривошипа 1 передается маховику 7 с муфтой сцепления и далее планетарному редуктору, состоящему из центрального колеса 10 с наружным зубом, трех сателлитов 11, центрального колеса 12 с внутренним зубом и водила 6. На оси водила установлена ведущая звездочка 13 цепной передачи; ведомая звездочка 14 установлена на ступице заднего колеса 15 велосипеда. От кривошипа приводится через зубчатую передачу (колеса 8 и 9) кулачок 16 с коромысловым толкателем 18 и роликом 17 механизма замыкания контактов цепи зажигания.
- Механизм поворота платформы 3 (рис. 1а) грузового автомобилясамосвала шарнирно установлен на кронштейнах рамы 5 и состоит из телескопического гидроцилиндра и поршня со штоком 2, соединенным с платформой 3 (шарнир B). Гидроцилиндр имеет наружный цилиндр I и внутренний выдвижной цилиндр Пря нагнетание масла в нижнюю полость гидроцилиндра сначала выдвигается внутренний цилиндр I' (вместе со звеном 2), а после упора его в уплотнительное кольцо начинает перемещаться относительно звеньев I и I' поршень со штоком 2. Масло в полость гидроцилиндра нагнетается роторным зубчатым насосом 10, зубчатые колеса которого получают вращение от коробки передач автомобиля через двухрядный планетарный редуктор 11 с колесами z1, z2, z3, z4 (число блоков сателлитов К=3). Давление в гидроцилиндре устанавливается регулятором давления, золотник которого кинематически связан с коромысловым толкателем 7 кулачкового механизма. Дисковый кулачок 6, установленный на оси D получает вращение через зубчатые колеса 8 и 9 (модуль колес 8 мм) от звена 3 и перемещает толкатель по закону, показанному на рис. 1б (при этом а1=а2, φу=φв=φс). Удаление толкателя и перемещение золотника соответствует углу поворота платформы 3, при котором сила действующая на звено 2, изменяется от начального до конечного значения согласно графику на рис. 1в. В процессе поворота платформы половина массы груза 4 ссыпается; при этом масса т изменяется от начальной до конечной по заданному закону (рис. 1г). Для предупреждения самоопрокидывания платформы на самосвале установлен ограничитель, состоящий из рычага 12, цепи 13 и пружины I4. При подъеме платформы на угол более 40° пружина растягивается, и при 5 этом на платформу 3 действует момент сопротивления, график изменения которого показан на рис. 1д.
- миллиметровка структурный анализ. Автокад и маткад к нему не требовали
- Министерство образования и науки РФ Федеральное государственное бюджетное образовательное учреждениевысшего профессионального образования«Национальный исследовательский университет «МЭИ » Институт дистанционного и дополнительного образования (ИДДО) РАСЧЕТНОЕ ЗАДАНИЕ по дисциплине «Микропроцессорные системы » СодержаниеЗадание. 31. Передискретизация. 41.1. Понятие в контексте звуковых сигналов. 41.2. Расчет требований алгоритма. 51.3. Оптимизация. 61.4. Расчет требований алгоритма после оптимизации. 72. Анализ технического решения. 82.1. Подбор компонентов. 82.2. Структурная схема. 92.3. Функциональная схема. 92.4. Блок схема алгоритма. 10Заключение. 11 ЗаданиеНеобходимо выполнять передискретизацию звукового сигнала 16 бит, 44100 Гц, два канала на частоту 48000 Гц. Для этого нужно реализовать блок интерполяции, включающий фильтр КИХ 32 порядка и блок децимации, также с КИХ фильтром 32 порядка. Вход с АЦП, выход – в память.Подобрать подходящее техническое решение, проанализировать стоимость, возможность работы в реальном времени, энергопотребление. Привести структурную и функциональную схемы МПС и блок-схему алгоритма работы.
- Министерство образования Российской ФедерацииМОСКОВСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТим. Н.Э. БАУМАНА Домашнее задание по курсу"Перспективы развития специальных ядерных энергетических установок" по темеУтилизация птб «Лепсе » на СРЗ «Нерпа » Оглавление1. Резюме1.1. Общее описание объекта1.2. Оценка рисков 1.3. Заключение 2. Описание производства 2.1. Местонахождение плавтехбазы «Лепсе » 2.2. Описание Производственных Площадок2.3. Конструкции и Состояние Зданий 2.4. Виды деятельности в области использования атомной энергии2.5. Объект использования атомной энергии плавучая технологическая база «Лепсе » 2.6. Основные технологические процессы2.7. Сведения об используемом оборудовании2.8. Контроль и управление2.9. Инженерные системы и коммуникации2.10. Опасные / Токсичные Материалы2.11. Сведения о Персонале и Рабочих Сменах2.12. Техническое Обслуживание и Проверки Оборудования2.13. Система Допуска к Выполнению Работ3. Убытки прошлых лет4. Степень риска / Условия площадки4.1. Внутренние риски4.1.1. Ядерные и радиационные риски4.1.2. Пожар и взрыв4.1.3. Поломка машин и оборудования4.2. Внешние риски4.2.1. Техногенные риски4.2.2. Столкновение с наземным / водным транспортом4.2.3. Падение летательных аппаратов4.3. Природные риски4.3.1. Климат4.3.2. Ураган, Смерч, Наводнение / Повреждение водой4.3.3. Состояние почв / Оседание почвы, Оползень4.3.4. Удар молнии4.3.5. Землетрясение, Вулканическая деятельность4.4. Социальные риски4.4.1. Кража / Кража со взломом4.4.2. Мятежи, забастовки, беспорядки4.4.3. Терроризм и диверсия4.5. Экологические риски4.5.1. Риски, связанные с наличием токсичных отходов4.5.2. Риски, связанные с радиационным воздействием4.6. Риски Гражданской Ответственности5. Управление безопасностью / Охрана5.1. Ядерная и радиационная безопасность5.2. Пожарная безопасность5.2.1. Регламентирующая документация по взрывопожаробезопасности5.2.2. Обучение методам пожаротушения5.2.3. Стационарные системы пожаротушения5.2.4. Переносные средства пожаротушения5.2.5. Пассивная противопожарная защита5.2.6. Системы обнаружения и пожарной сигнализации5.2.7. Контроль над курением5.2.8. Местные пожарные службы5.3. Планы мероприятий и действий в чрезвычайных обстоятельствах5.4. Квалификация персонала5.5