
РГР №1 Система, показанная на рисунках 1.1-1.5, состоит из следующих элементов. Грузы массами m1 и m2 движутся поступательно. К грузам прикреплены невесомые нерастяжимые нити, перекинутые или намотанные на блоки массами m3 и m4, которые могут без трения вращаться вокруг горизонтальных осей. (Решение → 14367)
Заказ №39164
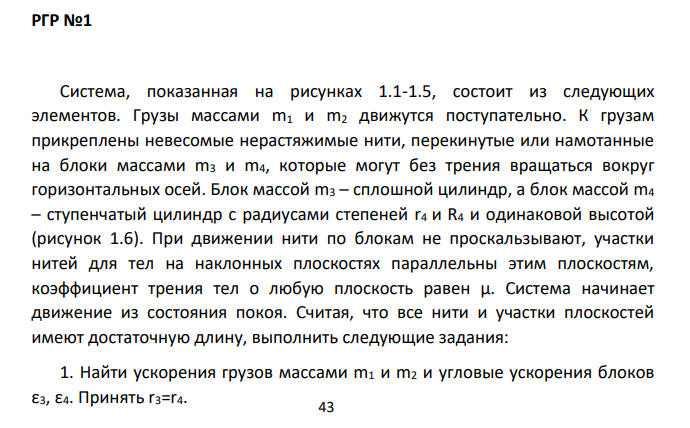
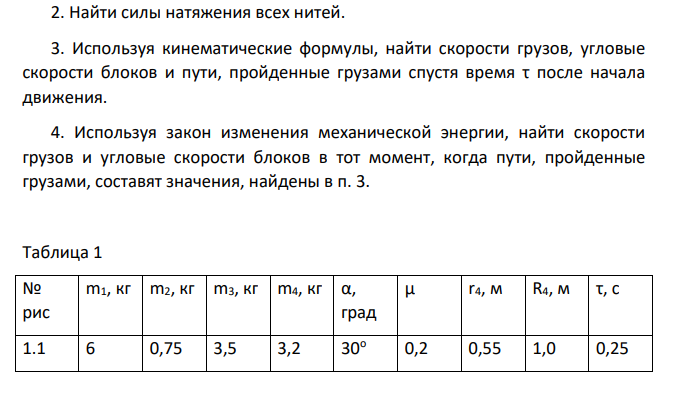
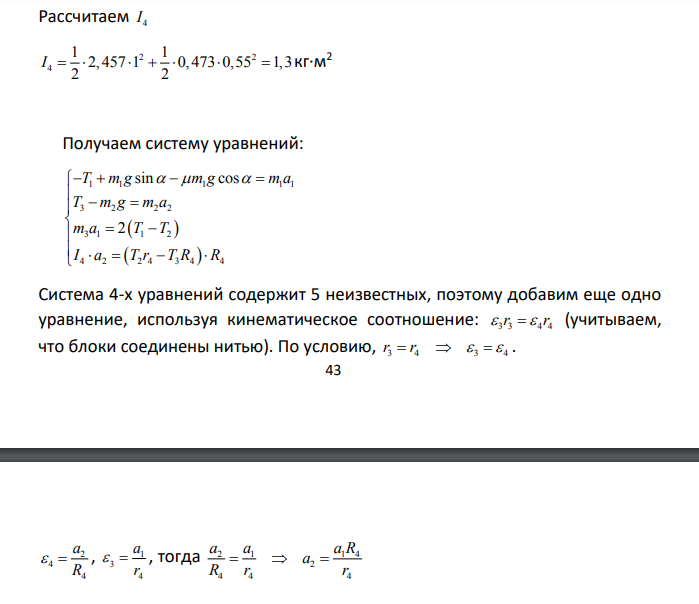
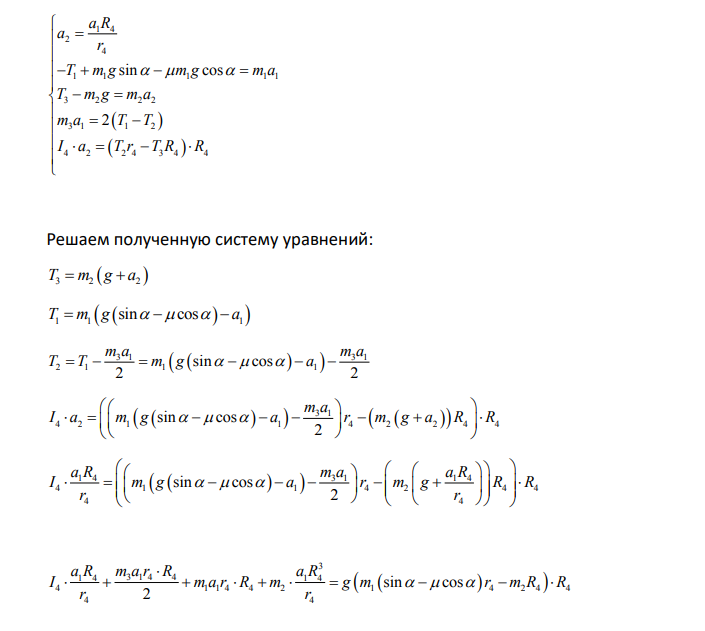
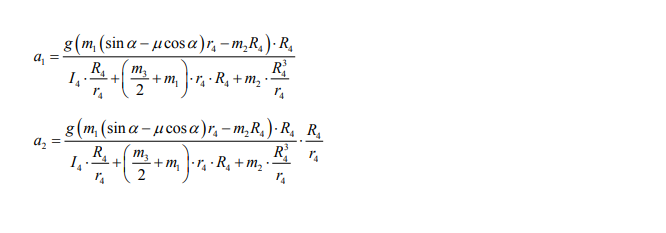
РГР №1 Система, показанная на рисунках 1.1-1.5, состоит из следующих элементов. Грузы массами m1 и m2 движутся поступательно. К грузам прикреплены невесомые нерастяжимые нити, перекинутые или намотанные на блоки массами m3 и m4, которые могут без трения вращаться вокруг горизонтальных осей. Блок массой m3 – сплошной цилиндр, а блок массой m4 – ступенчатый цилиндр с радиусами степеней r4 и R4 и одинаковой высотой (рисунок 1.6). При движении нити по блокам не проскальзывают, участки нитей для тел на наклонных плоскостях параллельны этим плоскостям, коэффициент трения тел о любую плоскость равен μ. Система начинает движение из состояния покоя. Считая, что все нити и участки плоскостей имеют достаточную длину, выполнить следующие задания: 1. Найти ускорения грузов массами m1 и m2 и угловые ускорения блоков ε3, ε4. Принять r3=r4. 43 4 2. Найти силы натяжения всех нитей. 3. Используя кинематические формулы, найти скорости грузов, угловые скорости блоков и пути, пройденные грузами спустя время τ после начала движения. 4. Используя закон изменения механической энергии, найти скорости грузов и угловые скорости блоков в тот момент, когда пути, пройденные грузами, составят значения, найдены в п. 3. Таблица 1 № рис m1, кг m2, кг m3, кг m4, кг α, град μ r4, м R4, м τ, с 1.1 6 0,75 3,5 3,2 30о 0,2 0,55 1,0 0,25
Решение:
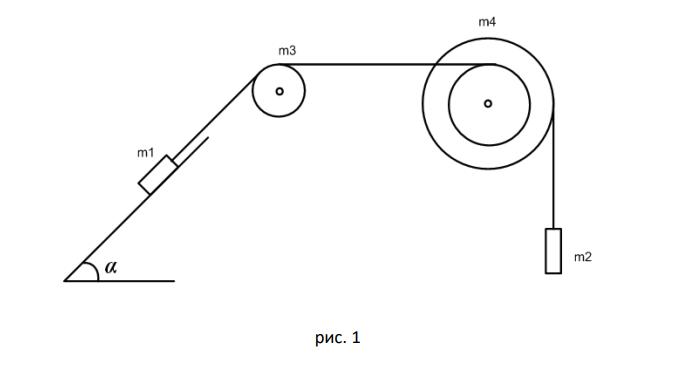
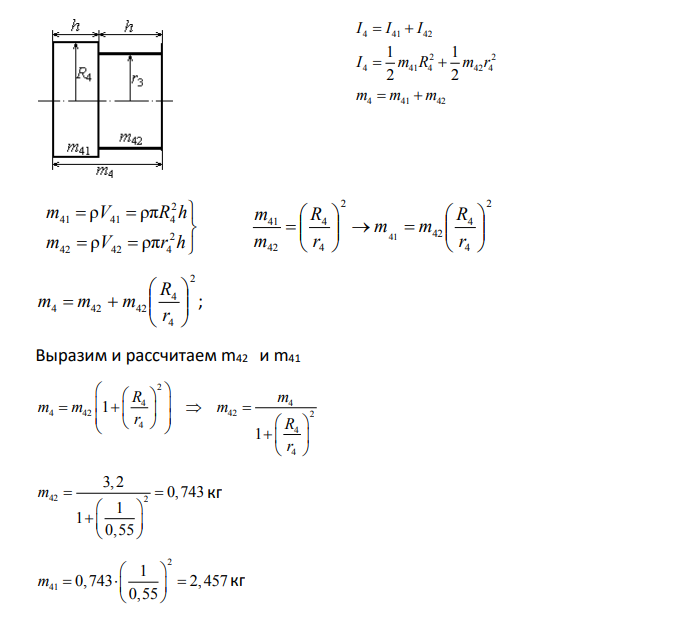
1. Определим ускорения грузов, угловые ускорения блоков и силы натяжения всех нитей. Изображаем силы, действующие на каждое из тел системы: силы тяжести mg1 , m g2 , m g3 , m g4 , силы натяжения нитей T1 , T2 , T3 , силу трения F mp , силы нормальной реакции опоры N1 , N3 , N4 . 1 a 3 F mp N4 2 a T3 mg1 m g2 α m g4 m g3 T1 T1 T2 T2 T3 N1 2 y 1 y х1 N3 z 4 43 6 Учитывая, что m m 1 2 , груз 1 движется вниз по наклонной плоскости, груз 2 вертикально вверх. Запишем основное уравнение динамики для четырех тел системы: 1) m g T N F m a 1 1 1 1 1 mp - для первого груза 2) m g T m a 2 3 2 2 m g N F T m a 2 2 3 2 2 mp - для второго груза, 3) 1 2 3 3 M M M M I T T m g N 3 3 -для блока 3. 4) 3 2 4 4 M M M M I T T m g N 4 4 - для блока 4. Запишем (1) и (2) в проекции на ох1 и оу1 и оу2: груз m1 ох1: 1 1 1 1 sin T m g F m a mp оу1: 1 1 1 cos 0; N m g F N тр 1 1 N m g cos 1 1 1 1 1 T m g m g m a sin cos (5) груз m2 2 oy : T m g m a 3 2 2 2 (6) В проекции на ось z уравнение 3): 1 2 1 2 3 3 3 3 3 1 1 2 3 3 ( )r ; ( )r a T T I I a T T r , где I3- момент инерции блока 3, 2 3 3 3 2 m r I , 2 3 3,5 0,55 0,53 2 I кг∙м2 Моменты сил тяжести m3g и N3 относительно оси вращения равны нулю. 2 3 3 2 1 1 2 3 3 1 1 2 ( ) r 2 2( ) m r a T T m a T T В проекции на ось z уравнение 4): 2 2 4 3 4 4 4 4 4 2 2 4 3 4 4 4 r ; r a T T R I I a T T R R R , где I4- момент инерции блока 4. Моменты сил тяжести m4g и N4 относительно оси вращения равны нулю. Определим момент инерции блока 4 – ступенчатого цилиндра 43 7 4 41 42 2 2 4 41 4 42 4 4 41 42 1 1 2 2 I I I I m R m r m m m m V r h m V R h 2 42 42 4 2 41 41 4 ρ ρπ ρ ρπ 2 4 4 42 2 4 4 42 41 41 r R m m r R m m 2 4 4 4 42 42 r R m m m ; Выразим и рассчитаем m42 и m41 2 4 4 4 42 42 2 4 4 4 1 1 R m m m m r R r 42 2 3,2 0,743 1 1 0,55 m кг 2 41 1 0,743 2,457 0,55 m кг Рассчитаем 4 I 2 2 4 1 1 2,457 1 0,473 0,55 1,3 2 2 I кг∙м2 Получаем систему уравнений: 1 1 1 1 1 3 2 2 2 3 1 1 2 4 2 2 4 3 4 4 sin cos 2 T m g m g m a T m g m a m a T T I a T r T R R Система 4-х уравнений содержит 5 неизвестных, поэтому добавим еще одно уравнение, используя кинематическое соотношение: 3 3 4 4 r r (учитываем, что блоки соединены нитью). По условию, 3 4 3 4 r r . 43 8 2 4 4 a R , 1 3 4 a r , тогда 2 1 1 4 2 4 4 4 a a a R a R r r 1 4 2 4 1 1 1 1 1 3 2 2 2 3 1 1 2 4 2 2 4 3 4 4 sin cos 2 a R a r T m g m g m a T m g m a m a T T I a T r T R R Решаем полученную систему уравнений: T m g a 3 2 2 T m g a 1 1 1 sin cos 3 1 3 1 2 1 1 1 sin cos 2 2 m a m a T T m g a 3 1 4 2 1 1 4 2 2 4 4 sin cos 2 m a I a m g a r m g a R R 1 4 1 4 3 1 4 1 1 4 2 4 4 4 4 sin cos 2 a R a R m a I m g a r m g R R r r 3 1 4 1 4 3 1 4 4 4 1 1 4 4 2 1 4 2 4 4 4 4 sin cos 2 a R a R m a r R I m a r R m g m r m R R r r 1 4 2 4 4 1 3 4 4 3 4 1 4 4 2 4 4 sin cos 2 g m r m R R a R R m I m r R m r r 1 4 2 4 4 4 2 3 4 4 3 4 4 1 4 4 2 4 4 sin cos 2 g m r m R R R a R R m r


- Количество радиоактивных ядер – N0=5000. За время t=0,3 года распадается в среднем ∆N=50 дер.
- Какие из указанных мер относятся к административным наказаниям: 1) Замечание; 2) Предупреждение; 3) Штраф; 4) Исправительные работы; 5) Ограничение свободы; 6) Лишение специального права, предоставленного физическому лицу; 7) Дисквалификация.
- При изотермическом расширении водорода массой m 1г объем газа Vувеличился в два раза. Определить работу А расширения, совершенную газом, если температура газа T 300К . Определить теплоту Q, переданную при этом газу.
- Найти пределы функций не пользуясь правилом Лопиталя в) lim
- Так как на разрушение кристаллической решетки поваренной соли затрачивается теплота, процесс эндотермический, поэтому температура раствора понижается. Данное свойство используется для уменьшения скорости протекания реакции и в том случае, когда необходимо замедлить процесс.
- Используя исходные данные, приведенные в таблице 1.1 (номер варианта выбирается по первой букве фамилии студента), составить годовые планы производства для конкретной номенклатуры продукции в стоимостном выражении в разрезе сборочного (
- В баллоне емкостью V 20л находится аргон под давлением p 800кПа 1 и температуре T1 325К . Когда из баллона было взято некоторое количество аргона, давление в баллоне понизилось до p 600кПа 2 , а температура установилась T2 300К . Определить массу т аргона, взятого из баллона.
- Какой объем 2н раствора щелочи потребуется для нейтрализации 10 см3 0,5н раствора уксусной кислоты?
- Ядро Li6 бомбардируется ядром Не3 . В результате образуется α-частнца Не4 и частица 2.
- Показатели Базисный год, тыс.руб. Факт, тыс.руб. Абсолютное отклонение, +/- Относительное отклонение, % (темп роста) 1. Выручка от продажи 30200 21600 346 101,73 2
- При одной и той же концентрации реагирующих веществ скорость реакции при 30°С вдвое выше, чем при 20°С. Вычислите величинуd InK/dТ при 300 K.
- Кастрюлю с водой поставили на газовую плиту. Газ горит постоянно.
- Аэрозоли, дымы, туманы: понятия, примеры. Значение аэрозолей в пищевой промышленности. Загрязнение окружающей среды аэрозолями, способы их разрушения.
- Завод работает в две смены. На начало года количество станков составляет 500 единиц. В апреле дополнительно устанавливается 60 станков, а в июле выбывают 50 станков. Число рабочих дней в году 260, плановый процент простоев на ремонт станка - 5%, производительность одного станка 4 метра в час. План выпуска продукции 7 500 000 метров, продолжительность смены 8часов. Определите производственную мощность завода и коэффициент использования мощности.