Ирина Эланс
Заказ: 1085188
Кинематический и силовой анализ механизма
Кинематический и силовой анализ механизма
Описание
Задание
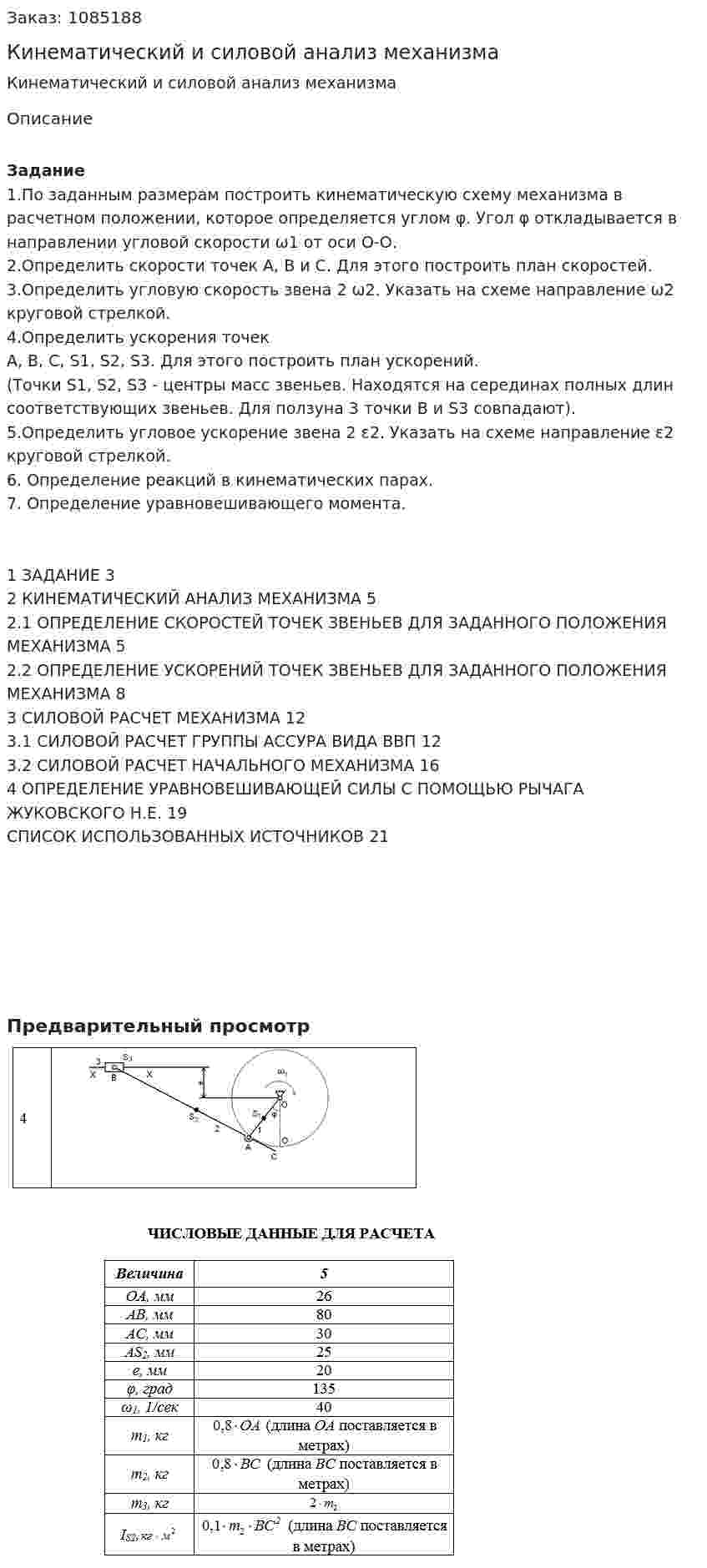
1.По заданным размерам построить кинематическую схему механизма в расчетном положении, которое определяется углом φ. Угол φ откладывается в направлении угловой скорости ω1 от оси О-О.
2.Определить скорости точек А, В и С. Для этого построить план скоростей.
3.Определить угловую скорость звена 2 ω2. Указать на схеме направление ω2 круговой стрелкой.
4.Определить ускорения точек А, В, С, S1, S2, S3. Для этого построить план ускорений.
(Точки S1, S2, S3 - центры масс звеньев. Находятся на серединах полных длин соответствующих звеньев. Для ползуна 3 точки В и S3 совпадают).
5.Определить угловое ускорение звена 2 ε2. Указать на схеме направление ε2 круговой стрелкой.
6. Определение реакций в кинематических парах.
7. Определение уравновешивающего момента.
1 ЗАДАНИЕ 3
2 КИНЕМАТИЧЕСКИЙ АНАЛИЗ МЕХАНИЗМА 5
2.1 ОПРЕДЕЛЕНИЕ СКОРОСТЕЙ ТОЧЕК ЗВЕНЬЕВ ДЛЯ ЗАДАННОГО ПОЛОЖЕНИЯ МЕХАНИЗМА 5
2.2 ОПРЕДЕЛЕНИЕ УСКОРЕНИЙ ТОЧЕК ЗВЕНЬЕВ ДЛЯ ЗАДАННОГО ПОЛОЖЕНИЯ МЕХАНИЗМА 8
3 СИЛОВОЙ РАСЧЕТ МЕХАНИЗМА 12
3.1 СИЛОВОЙ РАСЧЕТ ГРУППЫ АCСУРА ВИДА ВВП 12
3.2 СИЛОВОЙ РАСЧЕТ НАЧАЛЬНОГО МЕХАНИЗМА 16
4 ОПРЕДЕЛЕНИЕ УРАВНОВЕШИВАЮЩЕЙ СИЛЫ С ПОМОЩЬЮ РЫЧАГА ЖУКОВСКОГО Н.Е. 19
СПИСОК ИСПОЛЬЗОВАННЫХ ИСТОЧНИКОВ 21


- Кинематический и силовой анализ механизма (курсовая работа) Вариант 3 - Число оборотов ведущего звена 720 об/мин
- Кинематический расчет привода Схема 10, вариант 2 Мощность на валу исполнительного механизма P = 1.4 кВт, угловая скорость ω = 18 рад/с
- Кинематический расчет привода Схема 6, вариант 2Мощность на валу исполнительного механизма P = 2.7 кВт, угловая скорость ω = 17 рад/с
- Кинематический расчет приводаСхема 8, вариант 2 Мощность на валу исполнительного механизма P = 1.2 кВт, угловая скорость ω = 20 рад/с
- Кинематический расчет привода Требуемая мощность - Pтр = 9 кВт
- Кинематический синтез и анализ сложных зубчатых механизмов Задание. 1.1. Установить структуру механизма и определить его тип. 1.2. Вывести формулу передаточного отношения механизма, выразив его через числа зубьев колес. 1.3. Подобрать числа зубьев всех колес, обеспечивая заданные условия синтеза механизма (общее передаточное отношение механизма, количество сателлитов у планетарной ступени и т.д.); если количество сателлитов не оговорено, принять любое >1, удовлетворяющее условиям соседства и сборки. Передаточные отношения механизма или отдельных ступеней задает консультант. По подобранным числам зубьев колес рассчитать фактическое передаточное отношение механизма и сравнить по модулю с тем, которое соответствует условиям синтеза (допустимая погрешность ). 1.4. Считая угловую скорость выходного вала B зубчатого механизма заданной и равной по модулю угловой скорости входного звена рычажного механизма в задаче 2, определить абсолютные угловые скорости всех звеньев; для звеньев, образующих вращательные кинематические пары, рассчитать относительные угловые скорости. 1.5. Вычертить схему механизма в двух проекциях; на одной из проекций показать расположение сателлитов или связанных колес с учетом количества потоков. При определении диаметров колес принять их модуль m = 1 мм. Вариант: Подбором чисел зубьев обеспечить получение передаточного отношения iAB = -15,2. Угловая скорость выходного вала |ωB| =6,5 с
- Кинематический, статический и динамический расчет механизма манипулятора (курсовая работа)
- Кинематическая схема фрезерного станка 6m82
- Кинематически и силовой анализ механизма (курсовая работа)
- Кинематический анализ и силовой расчёт механизма (задание №24)
- Кинематический анализ механизма пресса
- Кинематический анализ механизма с группой 3-ей модификации 2-го вида.
- Кинематический анализ плоского механизма. Вариант 1
- Кинематический и силовой анализ механизма
Предварительный просмотр