
Система, показанная на рисунках 1-5, состоит из следующих элементов. Грузы массами m1 и m2 движутся поступательно. К грузам прикреплены невесомые нерастяжимые нити, перекинутые или намотанные на блоки массами m3 и m4, которые могут без трения вращаться вокруг горизонтальных осей. (Решение → 39400)
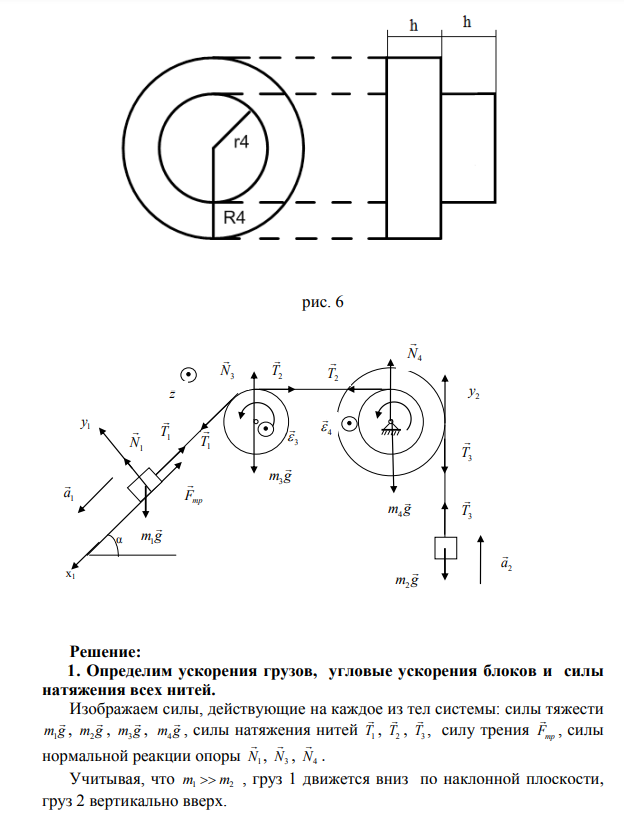
Система, показанная на рисунках 1-5, состоит из следующих элементов. Грузы массами m1 и m2 движутся поступательно. К грузам прикреплены невесомые нерастяжимые нити, перекинутые или намотанные на блоки массами m3 и m4, которые могут без трения вращаться вокруг горизонтальных осей. Блок массой m3 – сплошной цилиндр, а блок массой m4 – ступенчатый цилиндр с радиусами ступеней r4 и R4 и одинаковой высотой (рисунок 6). При движении по блокам нити не проскальзывают, участки нитей для тел на наклонных плоскостях параллельны этим плоскостям, коэффициент трения тел о любую плоскость равен μ. Система начинает движение из состояния покоя. Считая, что все нити и участки плоскостей имеют достаточную длину, выполнить следующие задания: 1. Найти ускорения грузов массами m1 и m2 и угловые ускорения блоков ε3, ε4. Принять r3=r4. 2. Найти силы натяжения всех нитей. 3. Используя кинематические формулы, найти скорости грузов, угловые скорости блоков и пути, пройденные грузами спустя время τ после начала движения. 4. Используя закон изменения механической энергии, найти скорости грузов и угловые скорости блоков в тот момент, когда пути, пройденные грузами, составят значения, найдены в п. 3. Численные значения и номер рисунка выбрать из таблицы 1. Таблица 1 Таблица 1 № рис m1, кг m2, кг m3, кг m4, кг α, град μ r4, м R4, м τ, с 1 4 0,50 0,5 3,0 45º 0,30 0,50 0,90 0,35
Решение:
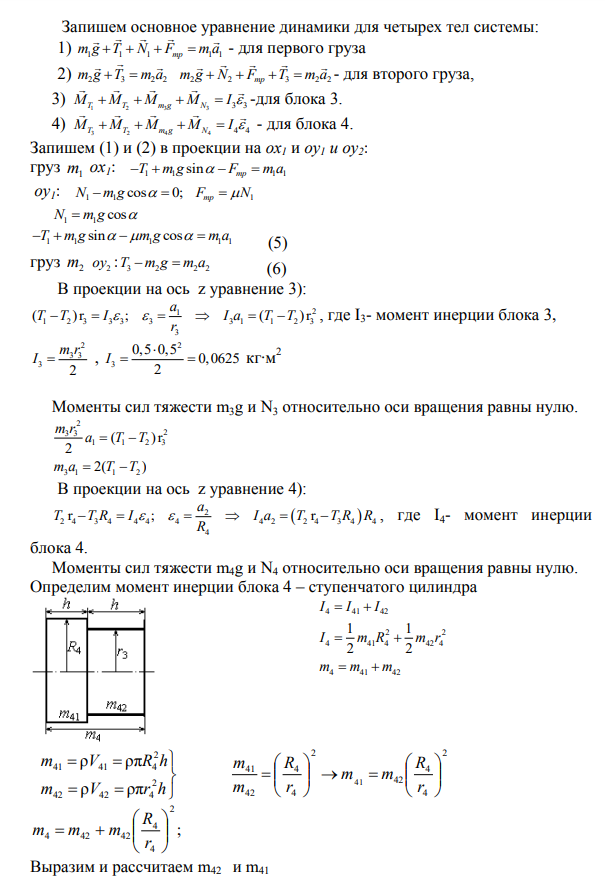
1. Определим ускорения грузов, угловые ускорения блоков и силы натяжения всех нитей. Изображаем силы, действующие на каждое из тел системы: силы тяжести , , , , силы натяжения нитей , , , силу трения , силы нормальной реакции опоры N1 , , . Учитывая, что , груз 1 движется вниз по наклонной плоскости, груз 2 вертикально вверх. mg1 m g2 m g3 m g4 T1 T2 T3 F mp N3 N4 m m 1 2 1 a 3 F mp N4 2 a T3 mg1 m g2 α m g4 m g3 T1 T1 T2 T2 T3 N1 2 y 1 y х1 N3 z 4 Запишем основное уравнение динамики для четырех тел системы: 1) m g T N F m a 1 1 1 1 1 mp - для первого груза 2) m g T m a 2 3 2 2 - для второго груза, 3) -для блока 3. 4) - для блока 4. Запишем (1) и (2) в проекции на ох1 и оу1 и оу2: груз m1 ох1: 1 1 1 1 sin T m g F m a mp оу1: 1 1 1 cos 0; N m g F N тр 1 1 N m g cos 1 1 1 1 1 T m g m g m a sin cos (5) груз m2 2 oy : T m g m a 3 2 2 2 (6) В проекции на ось z уравнение 3): , где I3- момент инерции блока 3, 2 3 3 3 2 m r I , 2 3 0,5 0,5 0,0625 2 I кг∙м 2 Моменты сил тяжести m3g и N3 относительно оси вращения равны нулю. В проекции на ось z уравнение 4): , где I4- момент инерции блока 4. Моменты сил тяжести m4g и N4 относительно оси вращения равны нулю. Определим момент инерции блока 4 – ступенчатого цилиндра 4 41 42 2 2 4 41 4 42 4 4 41 42 1 1 2 2 I I I I m R m r m m m m V r h m V R h 2 42 42 4 2 41 41 4 ρ ρπ ρ ρπ 2 4 4 42 2 4 4 42 41 4 1 r R m m r R m m 2 4 4 4 42 42 r R m m m ; Выразим и рассчитаем m42 и m41


- Источник тока замкнули на катушку индуктивностью 0,2 Гн. Через время 0,1 с после замыкания цепи сила тока достигла 0,95 предельного значения. Определить сопротивление катушки.
- На рис. изображены сечения двух прямолинейных длинных проводников с током. Расстояние между проводниками АВ. Направления токов указаны на рисунке. Найти индукцию магнитного поля в точке М
- Используя формулу Пуассона, найти решение задачи Коши для уравнения теплопроводности
- Найти решение первой смешанной задачи для уравнения теплопроводности на отрезке
- Решить первую смешанную задачу для волнового уравнения в прямоугольнике
- Решить первую смешанную задачу для волнового уравнения на отрезке
- Найти функцию, удовлетворяющую внутри круга уравнению Гельмгольца и принимающую на границе круга заданные значения
- Прямой провод длиной l = 10 см, по которому течет ток I = 20 А, находится в однородном магнитном поле с индукцией В = 0,01 Тл. На провод действует сила F = 10 мН.
- Протон, ускоренный разностью потенциалов U=500 кВ, пролетает поперечное однородное магнитное поле с индукцией В=0,51 Тл. Толщина области с полем d = 10 см.
- Катушка длиной l=20 см содержит N=100 витков. По обмотке катушки идет ток I= 5 А.
- Бесконечно длинный тонкий проводник с током I 50 А имеет изгиб (плоскую петлю) радиусом R 10 см. Определить в точке О магнитную индукцию В поля, создаваемого этим током, в случае г, изображенном на рисунке.
- Два круговых витка радиусом R=4 см каждый расположены в параллельных плоскостях на расстоянии d = 5 см друг от друга. По виткам текут токи I1 = I2 = 4 А.
- На рисунке изображены сечения трех прямолинейных бесконечно длинных проводников с токами. Расстояния АВ=ВС=5 см, токи I1 = I2 = I и I3 = 2I.
- Материальная точка начинает двигаться по плоской траектории так, что ее тангенциальное ускорение постоянно и равно a 30 м/с2 , а нормальное ускорение зависит от времени по закону: 2 5 n a t , м/с2 . Найти зависимость полного ускорения и радиуса кривизны траектории от времени.